Example Calibrate Planar Fisheye
From BoofCV
Jump to navigationJump to searchThe printable version is no longer supported and may have rendering errors. Please update your browser bookmarks and please use the default browser print function instead.
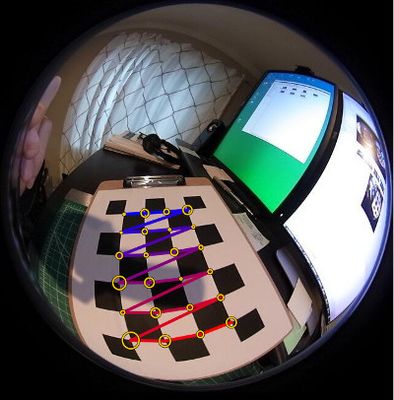
Detected Calibration Target in a Fisheye Camera.

This example demonstrates how to compute the intrinsic camera parameters for a fisheye camera lens. Fisheye lenses exhibit significantly more distortion than regular lenses with a more narrow field of view. Its not unusual for a fisheye lens to have a FOV of 185 degrees. The calibration process is very similar to regular cameras. A planar calibration target is shown at different angles across the entire field of view. The main difference is the camera model.
Example File: ExampleCalibrateFisheye.java
Calibration Tutorial: Wikipage
Concepts:
- Camera calibration
- Fisheye Lens distortion
- Intrinsic parameters
Relevant Videos:
Related Examples:
Example Code
/**
* Example of how to calibrate a single (monocular) fisheye camera using a high level interface. This example
* for the most part follows the same routine as {@link ExampleCalibrateMonocular}. Fisheye cameras tend to require
* more images to properly calibrate. Often people will use larger calibration targets too that are easier to
* see at a distance and cover more of the fisheye's camera large FOV.
*
* @see CalibrateMonoPlanar
*
* @author Peter Abeles
*/
public class ExampleCalibrateFisheye {
public static void main( String args[] ) {
DetectorFiducialCalibration detector;
List<String> images;
// Circle based calibration targets not not recommended because the sever lens distortion will change
// the apparent location of tangent points.
// Square Grid example
// detector = FactoryFiducialCalibration.squareGrid(null, new ConfigGridDimen(4, 3, 30, 30));
// images = UtilIO.listAll(UtilIO.pathExample("calibration/fisheye/square_grid"));
// Chessboard Example
detector = FactoryFiducialCalibration.chessboardX(null,new ConfigGridDimen(7, 5, 30));
images = UtilIO.listAll(UtilIO.pathExample("calibration/fisheye/chessboard"));
// Declare and setup the calibration algorithm
CalibrateMonoPlanar calibrationAlg = new CalibrateMonoPlanar(detector.getLayout());
// tell it type type of target and which parameters to estimate
calibrationAlg.configureUniversalOmni( true, 2, false);
// it's also possible to fix the mirror offset parameter
// 0 = pinhole camera. 1 = fisheye
// calibrationAlg.configureUniversalOmni( true, 2, false,1.0);
for( String n : images ) {
BufferedImage input = UtilImageIO.loadImage(n);
if( input != null ) {
GrayF32 image = ConvertBufferedImage.convertFrom(input,(GrayF32)null);
if( detector.process(image)) {
calibrationAlg.addImage(detector.getDetectedPoints().copy());
} else {
System.err.println("Failed to detect target in " + n);
}
}
}
// process and compute intrinsic parameters
CameraUniversalOmni intrinsic = calibrationAlg.process();
// save results to a file and print out
CalibrationIO.save(intrinsic, "fisheye.yaml");
calibrationAlg.printStatistics();
System.out.println();
System.out.println("--- Intrinsic Parameters ---");
System.out.println();
intrinsic.print();
}
}