Example Fit Polygon
From BoofCV
Jump to navigationJump to searchThe printable version is no longer supported and may have rendering errors. Please update your browser bookmarks and please use the default browser print function instead.
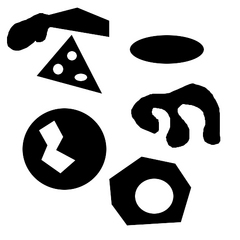
Input image with curves and polygons
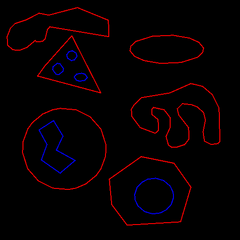
Fitted polygons. Red for external contour and blue for internal contour.


Demonstration for how to fit a polygon to object contours and edges. The input contours can be found from binary blobs and the edge sequence from Canny edge detector. This is often a useful preprocessing step before applying a higher level image processing algorithm.
Example Code:
Concepts:
- Object contours/edges
- Shape fitting
Relevant Videos:
Relevant Examples:
Example Code
/**
* Demonstration of how to convert a point sequence describing an objects outline/contour into a sequence of line
* segments. Useful when analysing shapes such as squares and triangles or when trying to simply the low level
* pixel output.
*
* @author Peter Abeles
*/
public class ExampleFitPolygon {
// Used to bias it towards more or fewer sides. larger number = fewer sides
static double cornerPenalty = 0.25;
// The fewest number of pixels a side can have
static int minSide = 10;
static ListDisplayPanel gui = new ListDisplayPanel();
/**
* Fits polygons to found contours around binary blobs.
*/
public static void fitBinaryImage(GrayF32 input) {
GrayU8 binary = new GrayU8(input.width,input.height);
BufferedImage polygon = new BufferedImage(input.width,input.height,BufferedImage.TYPE_INT_RGB);
// the mean pixel value is often a reasonable threshold when creating a binary image
double mean = ImageStatistics.mean(input);
// create a binary image by thresholding
ThresholdImageOps.threshold(input, binary, (float) mean, true);
// reduce noise with some filtering
GrayU8 filtered = BinaryImageOps.erode8(binary, 1, null);
filtered = BinaryImageOps.dilate8(filtered, 1, null);
// Find internal and external contour around each shape
List<Contour> contours = BinaryImageOps.contour(filtered, ConnectRule.EIGHT,null);
// Fit a polygon to each shape and draw the results
Graphics2D g2 = polygon.createGraphics();
g2.setStroke(new BasicStroke(2));
for( Contour c : contours ) {
// Fit the polygon to the found external contour. Note loop = true
List<PointIndex_I32> vertexes = ShapeFittingOps.fitPolygon(c.external,true, minSide,cornerPenalty);
g2.setColor(Color.RED);
VisualizeShapes.drawPolygon(vertexes,true,g2);
// handle internal contours now
g2.setColor(Color.BLUE);
for( List<Point2D_I32> internal : c.internal ) {
vertexes = ShapeFittingOps.fitPolygon(internal,true, minSide,cornerPenalty);
VisualizeShapes.drawPolygon(vertexes,true,g2);
}
}
gui.addImage(polygon, "Binary Blob Contours");
}
/**
* Fits a sequence of line-segments into a sequence of points found using the Canny edge detector. In this case
* the points are not connected in a loop. The canny detector produces a more complex tree and the fitted
* points can be a bit noisy compared to the others.
*/
public static void fitCannyEdges( GrayF32 input ) {
BufferedImage displayImage = new BufferedImage(input.width,input.height,BufferedImage.TYPE_INT_RGB);
// Finds edges inside the image
CannyEdge<GrayF32,GrayF32> canny =
FactoryEdgeDetectors.canny(2, true, true, GrayF32.class, GrayF32.class);
canny.process(input,0.1f,0.3f,null);
List<EdgeContour> contours = canny.getContours();
Graphics2D g2 = displayImage.createGraphics();
g2.setStroke(new BasicStroke(2));
// used to select colors for each line
Random rand = new Random(234);
for( EdgeContour e : contours ) {
g2.setColor(new Color(rand.nextInt()));
for(EdgeSegment s : e.segments ) {
// fit line segments to the point sequence. Note that loop is false
List<PointIndex_I32> vertexes = ShapeFittingOps.fitPolygon(s.points,false, minSide,cornerPenalty);
VisualizeShapes.drawPolygon(vertexes, false, g2);
}
}
gui.addImage(displayImage, "Canny Trace");
}
/**
* Detects contours inside the binary image generated by canny. Only the external contour is relevant. Often
* easier to deal with than working with Canny edges directly.
*/
public static void fitCannyBinary( GrayF32 input ) {
BufferedImage displayImage = new BufferedImage(input.width,input.height,BufferedImage.TYPE_INT_RGB);
GrayU8 binary = new GrayU8(input.width,input.height);
// Finds edges inside the image
CannyEdge<GrayF32,GrayF32> canny =
FactoryEdgeDetectors.canny(2, false, true, GrayF32.class, GrayF32.class);
canny.process(input,0.1f,0.3f,binary);
// Only external contours are relevant
List<Contour> contours = BinaryImageOps.contourExternal(binary, ConnectRule.EIGHT);
Graphics2D g2 = displayImage.createGraphics();
g2.setStroke(new BasicStroke(2));
// used to select colors for each line
Random rand = new Random(234);
for( Contour c : contours ) {
List<PointIndex_I32> vertexes = ShapeFittingOps.fitPolygon(c.external,true, minSide,cornerPenalty);
g2.setColor(new Color(rand.nextInt()));
VisualizeShapes.drawPolygon(vertexes,true,g2);
}
gui.addImage(displayImage, "Canny Contour");
}
public static void main( String args[] ) {
// load and convert the image into a usable format
BufferedImage image = UtilImageIO.loadImage(UtilIO.pathExample("shapes/shapes02.png"));
GrayF32 input = ConvertBufferedImage.convertFromSingle(image, null, GrayF32.class);
fitCannyEdges(input);
fitCannyBinary(input);
fitBinaryImage(input);
gui.addImage(image,"Original");
ShowImages.showWindow(gui, "Polygon from Contour", true);
}
}