Difference between revisions of "Example Sparse Bundle Adjustment"
From BoofCV
Jump to navigationJump to searchm |
m |
||
| Line 8: | Line 8: | ||
Example Code: | Example Code: | ||
* [https://github.com/lessthanoptimal/BoofCV/blob/v0. | * [https://github.com/lessthanoptimal/BoofCV/blob/v0.35/examples/src/main/java/boofcv/examples/sfm/ExampleBundleAdjustment.java ExampleBundleAdjustment.java] | ||
Concepts: | Concepts: | ||
| Line 115: | Line 115: | ||
PointCloudViewer viewer = VisualizeData.createPointCloudViewer(); | PointCloudViewer viewer = VisualizeData.createPointCloudViewer(); | ||
viewer.setFog(true); | viewer.setFog(true); | ||
viewer.setColorizer(new SingleAxisRgb.Z().fperiod(20)); // makes it easier to see points without RGB color | |||
viewer.setClipDistance(70); // done for visualization to make it easier to separate objects with the fog | viewer.setClipDistance(70); // done for visualization to make it easier to separate objects with the fog | ||
viewer.setDotSize(1); | viewer.setDotSize(1); | ||
Revision as of 18:03, 23 December 2019
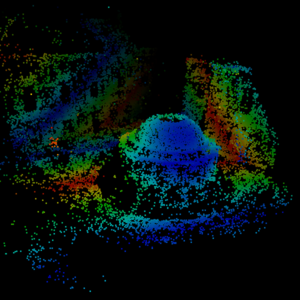
3D point refined using sparse bundle adjustment

Bundle Adjustment is the typical last step in almost every algorithm which involve reconstruction of a scene from three or more images. Bundle Adjustment is a non-linear batch optimization where feature locations, camera positions, and intrinsic camera parameters are all optimized at once. Sparse Bundle Adjustment (SBA) refers to algorithms which take advantage of the sparsity, speeding up the computation many, many times. In this example, 67,000 parameters are optimized and the reprojection error is reduced by about 7000% in 2 minutes using a single thread.
Example Code:
Concepts:
- Bundle Adjustment
- Multiple Views
- Scene Reconstruction
Example Code
/**
* Demonstration for running sparse bundle adjustment in BoofCV. Bundle adjustment is a problem where a
* a batch optimization is applied to camera pose, camera parameters, and point locations are all optimized.
* It's the last step in scene reconstruction and is a very important step. In recent years, applying bundle
* adjustment to very large scale problems has become important.
*
* In this example, data from the "Bundle Adjustment in the Large" paper is used. These data sets are often used
* to compare different bundle adjustment algorithms against each other. Which is why BoofCV provides a parser
* and camera model for their dataset. The algorithms in BoofCV are in the early stage of development but on more
* modest problems shows performance that's comparable to Ceres Solver. BoofCV has yet to be applied to what would
* be now considered a truly large scale problem that takes day(s) to solve.
*
* @author Peter Abeles
*/
public class ExampleBundleAdjustment {
public static void main(String[] args) throws IOException {
// Because the Bundle Adjustment in the Large data set is popular, a file reader and writer is included
// with BoofCV. BoofCV uses two data types to describe the parameters in a bundle adjustment problem
// BundleAdjustmentSceneStructure is used for camera parameters, camera locations, and 3D points
// BundleAdjustmentObservations for image observations of 3D points
// ExampleMultiViewSceneReconstruction gives a better feel for these data structures or you can look
// at the source code of CodecBundleAdjustmentInTheLarge
CodecBundleAdjustmentInTheLarge parser = new CodecBundleAdjustmentInTheLarge();
parser.parse(new File(UtilIO.pathExample("sfm/problem-16-22106-pre.txt")));
// Print information which gives you an idea of the problem's scale
System.out.println("Optimizing "+parser.scene.getParameterCount()+
" parameters with "+parser.observations.getObservationCount()+" observations\n\n");
// Configure the sparse Levenberg-Marquardt solver
ConfigLevenbergMarquardt configLM = new ConfigLevenbergMarquardt();
// Important tuning parameter. Won't converge to a good solution if picked improperly. Small changes
// to this problem and speed up or slow down convergence and change the final result. This is true for
// basically all solvers.
configLM.dampeningInitial = 1e-3;
// Improves Jacobian matrix's condition. Recommended in general but not important in this problem
configLM.hessianScaling = true;
ConfigBundleAdjustment configSBA = new ConfigBundleAdjustment();
configSBA.configOptimizer = configLM;
// Create and configure the bundle adjustment solver
BundleAdjustment<SceneStructureMetric> bundleAdjustment = FactoryMultiView.bundleSparseMetric(configSBA);
// prints out useful debugging information that lets you know how well it's converging
bundleAdjustment.setVerbose(System.out,0);
// Specifies convergence criteria
bundleAdjustment.configure(1e-6, 1e-6, 50);
// Scaling each variable type so that it takes on a similar numerical value. This aids in optimization
// Not important for this problem but is for others
ScaleSceneStructure bundleScale = new ScaleSceneStructure();
bundleScale.applyScale(parser.scene, parser.observations);
bundleAdjustment.setParameters(parser.scene, parser.observations);
// Runs the solver. This will take a few minutes. 7 iterations takes about 3 minutes on my computer
long startTime = System.currentTimeMillis();
double errorBefore = bundleAdjustment.getFitScore();
if( !bundleAdjustment.optimize(parser.scene) ) {
throw new RuntimeException("Bundle adjustment failed?!?");
}
// Print out how much it improved the model
System.out.println();
System.out.printf("Error reduced by %.1f%%\n",(100.0*(errorBefore/bundleAdjustment.getFitScore()-1.0)));
System.out.println(BoofMiscOps.milliToHuman(System.currentTimeMillis()-startTime));
// Return parameters to their original scaling. Can probably skip this step.
bundleScale.undoScale(parser.scene, parser.observations);
// Visualize the results using a point cloud viewer
visualizeInPointCloud(parser.scene);
}
private static void visualizeInPointCloud(SceneStructureMetric structure ) {
List<Point3D_F64> cloudXyz = new ArrayList<>();
Point3D_F64 world = new Point3D_F64();
Point3D_F64 camera = new Point3D_F64();
for( int i = 0; i < structure.points.size; i++ ) {
// Get 3D location
SceneStructureMetric.Point p = structure.points.get(i);
p.get(world);
// Project point into an arbitrary view
for (int j = 0; j < p.views.size; j++) {
int viewIdx = p.views.get(j);
SePointOps_F64.transform(structure.views.data[viewIdx].worldToView,world,camera);
cloudXyz.add( world.copy() );
break;
}
}
PointCloudViewer viewer = VisualizeData.createPointCloudViewer();
viewer.setFog(true);
viewer.setColorizer(new SingleAxisRgb.Z().fperiod(20)); // makes it easier to see points without RGB color
viewer.setClipDistance(70); // done for visualization to make it easier to separate objects with the fog
viewer.setDotSize(1);
viewer.setTranslationStep(0.05);
viewer.addCloud(cloudXyz);
viewer.setCameraHFov(UtilAngle.radian(60));
// Give it a good initial pose. This was determined through trial and error
Se3_F64 cameraToWorld = new Se3_F64();
cameraToWorld.T.set(-10.848385, -6.957626, 2.9747992);
ConvertRotation3D_F64.eulerToMatrix(EulerType.XYZ,-2.734419,-0.27446,-0.24310,cameraToWorld.R);
viewer.setCameraToWorld(cameraToWorld);
SwingUtilities.invokeLater(()->{
viewer.getComponent().setPreferredSize(new Dimension(600,600));
ShowImages.showWindow(viewer.getComponent(), "Refined Scene", true);
});
}
}