Difference between revisions of "Example Image Stitching"
m |
m |
||
| (30 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
<center> | <center> | ||
<gallery caption="Images stitched together using example code" heights=250 widths=250 > | <gallery caption="Images stitched together using example code" heights=250 widths=250 > | ||
| Line 9: | Line 7: | ||
</center> | </center> | ||
Image stitching refers to combining two or more overlapping images together into a single large image. | This example is designed to demonstrate several aspects of BoofCV by stitching images together. Image stitching refers to combining two or more overlapping images together into a single large image. When stitching images together the goal is to find a 2D geometric transform which minimize the error (difference in appearance) in overlapping regions. There are many ways to do this, in the example below point image features are found, associated, and then a 2D transform is found robustly using the associated features. | ||
Example File: [https://github.com/lessthanoptimal/BoofCV/blob/ | Example File: [https://github.com/lessthanoptimal/BoofCV/blob/v0.40/examples/src/main/java/boofcv/examples/geometry/ExampleImageStitching.java ExampleImageStitching.java] | ||
Concepts: | Concepts: | ||
| Line 20: | Line 18: | ||
* Homography | * Homography | ||
Relevant | Relevant Videos: | ||
* [[ | * [http://www.youtube.com/watch?v=59RJeLlDAxQ YouTube Video] | ||
* [[ | |||
Related Examples: | |||
* [[Example_Associate_Interest_Points| Associate Interest Points]] | |||
* [[Example_Video_Mosaic| Video Mosaic]] | |||
= Algorithm Introduction = | = Algorithm Introduction = | ||
| Line 28: | Line 30: | ||
Described at a high level this image stitching algorithm can be summarized as follows: | Described at a high level this image stitching algorithm can be summarized as follows: | ||
# Detect | # Detect and describe point features | ||
# Associate features together | # Associate features together | ||
# Robust fitting to find transform | # Robust fitting to find transform | ||
| Line 36: | Line 37: | ||
The core algorithm has been coded up using abstracted code which allows different models and algorithms to be changed easily. Output examples are shown at the top of this page. | The core algorithm has been coded up using abstracted code which allows different models and algorithms to be changed easily. Output examples are shown at the top of this page. | ||
= | = Example Code = | ||
<syntaxhighlight lang="java"> | <syntaxhighlight lang="java"> | ||
public class ExampleImageStitching { | |||
/** | /** | ||
* Using abstracted code, find a transform which | * Using abstracted code, find a transform which minimizes the difference between corresponding features | ||
* in both images. | * in both images. This code is completely model independent and is the core algorithms. | ||
*/ | */ | ||
public static<T extends | public static <T extends ImageGray<T>, TD extends TupleDesc<TD>> Homography2D_F64 | ||
computeTransform( T imageA , T imageB , | computeTransform( T imageA, T imageB, | ||
DetectDescribePoint<T, TD> detDesc, | |||
AssociateDescription<TD> associate, | |||
ModelMatcher<Homography2D_F64, AssociatedPair> modelMatcher ) { | |||
// get the length of the description | // get the length of the description | ||
List<Point2D_F64> pointsA = new ArrayList<>(); | |||
DogArray<TD> descA = UtilFeature.createArray(detDesc, 100); | |||
List<Point2D_F64> pointsA = new ArrayList< | List<Point2D_F64> pointsB = new ArrayList<>(); | ||
DogArray<TD> descB = UtilFeature.createArray(detDesc, 100); | |||
List<Point2D_F64> pointsB = new ArrayList< | |||
// extract feature locations and descriptions from each image | // extract feature locations and descriptions from each image | ||
describeImage(imageA, | describeImage(imageA, detDesc, pointsA, descA); | ||
describeImage(imageB, | describeImage(imageB, detDesc, pointsB, descB); | ||
// Associate features between the two images | // Associate features between the two images | ||
associate.associate( | associate.setSource(descA); | ||
associate.setDestination(descB); | |||
associate.associate(); | |||
// create a list of AssociatedPairs that tell the model matcher how a feature moved | // create a list of AssociatedPairs that tell the model matcher how a feature moved | ||
FastAccess<AssociatedIndex> matches = associate.getMatches(); | |||
List<AssociatedPair> pairs = new ArrayList< | List<AssociatedPair> pairs = new ArrayList<>(); | ||
for( int i = 0; i < matches.size(); i++ ) { | for (int i = 0; i < matches.size(); i++) { | ||
AssociatedIndex match = matches.get(i); | AssociatedIndex match = matches.get(i); | ||
| Line 83: | Line 74: | ||
Point2D_F64 b = pointsB.get(match.dst); | Point2D_F64 b = pointsB.get(match.dst); | ||
pairs.add( new AssociatedPair(a,b,false)); | pairs.add(new AssociatedPair(a, b, false)); | ||
} | } | ||
// find the best fit model to describe the change between these images | // find the best fit model to describe the change between these images | ||
if( !modelMatcher.process(pairs | if (!modelMatcher.process(pairs)) | ||
throw new RuntimeException("Model Matcher failed!"); | throw new RuntimeException("Model Matcher failed!"); | ||
// return the found image transform | // return the found image transform | ||
return modelMatcher. | return modelMatcher.getModelParameters().copy(); | ||
} | } | ||
/** | /** | ||
* Detects features inside the two images and computes descriptions at those points. | * Detects features inside the two images and computes descriptions at those points. | ||
*/ | */ | ||
private static <T extends | private static <T extends ImageGray<T>, TD extends TupleDesc<TD>> | ||
void describeImage( T image, | |||
DetectDescribePoint<T, TD> detDesc, | |||
List<Point2D_F64> points, | |||
DogArray<TD> listDescs ) { | |||
detDesc.detect(image); | |||
listDescs.reset(); | |||
for (int i = 0; i < detDesc.getNumberOfFeatures(); i++) { | |||
points.add(detDesc.getLocation(i).copy()); | |||
listDescs.grow().setTo(detDesc.getDescription(i)); | |||
} | } | ||
} | } | ||
= | /** | ||
* Given two input images create and display an image where the two have been overlayed on top of each other. | |||
*/ | |||
public static <T extends ImageGray<T>> | |||
void stitch( BufferedImage imageA, BufferedImage imageB, Class<T> imageType ) { | |||
T inputA = ConvertBufferedImage.convertFromSingle(imageA, null, imageType); | |||
T inputB = ConvertBufferedImage.convertFromSingle(imageB, null, imageType); | |||
// Detect using the standard SURF feature descriptor and describer | |||
DetectDescribePoint detDesc = FactoryDetectDescribe.surfStable( | |||
new ConfigFastHessian(1, 2, 200, 1, 9, 4, 4), null, null, imageType); | |||
ScoreAssociation<TupleDesc_F64> scorer = FactoryAssociation.scoreEuclidean(TupleDesc_F64.class, true); | |||
AssociateDescription<TupleDesc_F64> associate = FactoryAssociation.greedy(new ConfigAssociateGreedy(true, 2), scorer); | |||
// fit the images using a homography. This works well for rotations and distant objects. | |||
ModelMatcher<Homography2D_F64, AssociatedPair> modelMatcher = | |||
FactoryMultiViewRobust.homographyRansac(null, new ConfigRansac(60, 3)); | |||
Homography2D_F64 H = computeTransform(inputA, inputB, detDesc, associate, modelMatcher); | |||
renderStitching(imageA, imageB, H); | |||
} | |||
/** | /** | ||
* | * Renders and displays the stitched together images | ||
*/ | */ | ||
public static | public static void renderStitching( BufferedImage imageA, BufferedImage imageB, | ||
Homography2D_F64 fromAtoB ) { | |||
// specify size of output image | |||
double scale = 0.5; | |||
// Convert into a BoofCV color format | |||
Planar<GrayF32> colorA = | |||
ConvertBufferedImage.convertFromPlanar(imageA, null, true, GrayF32.class); | |||
Planar<GrayF32> colorB = | |||
ConvertBufferedImage.convertFromPlanar(imageB, null, true, GrayF32.class); | |||
// Where the output images are rendered into | |||
Planar<GrayF32> work = colorA.createSameShape(); | |||
// Adjust the transform so that the whole image can appear inside of it | |||
Homography2D_F64 fromAToWork = new Homography2D_F64(scale, 0, colorA.width/4, 0, scale, colorA.height/4, 0, 0, 1); | |||
Homography2D_F64 fromWorkToA = fromAToWork.invert(null); | |||
// Used to render the results onto an image | |||
PixelTransformHomography_F32 model = new PixelTransformHomography_F32(); | |||
InterpolatePixelS<GrayF32> interp = FactoryInterpolation.bilinearPixelS(GrayF32.class, BorderType.ZERO); | |||
ImageDistort<Planar<GrayF32>, Planar<GrayF32>> distort = | |||
DistortSupport.createDistortPL(GrayF32.class, model, interp, false); | |||
distort.setRenderAll(false); | |||
// | // Render first image | ||
model.setTo(fromWorkToA); | |||
distort.apply(colorA, work); | |||
// Render second image | |||
Homography2D_F64 fromWorkToB = fromWorkToA.concat(fromAtoB, null); | |||
model.setTo(fromWorkToB); | |||
distort.apply(colorB, work); | |||
// Convert the rendered image into a BufferedImage | |||
BufferedImage output = new BufferedImage(work.width, work.height, imageA.getType()); | |||
ConvertBufferedImage.convertTo(work, output, true); | |||
Graphics2D g2 = output.createGraphics(); | |||
// draw lines around the distorted image to make it easier to see | |||
Homography2D_F64 fromBtoWork = fromWorkToB.invert(null); | |||
Point2D_I32 corners[] = new Point2D_I32[4]; | |||
corners[0] = renderPoint(0, 0, fromBtoWork); | |||
corners[1] = renderPoint(colorB.width, 0, fromBtoWork); | |||
corners[2] = renderPoint(colorB.width, colorB.height, fromBtoWork); | |||
corners[3] = renderPoint(0, colorB.height, fromBtoWork); | |||
g2.setColor(Color.ORANGE); | |||
g2.setStroke(new BasicStroke(4)); | |||
g2.setRenderingHint(RenderingHints.KEY_ANTIALIASING, RenderingHints.VALUE_ANTIALIAS_ON); | |||
g2.drawLine(corners[0].x, corners[0].y, corners[1].x, corners[1].y); | |||
g2.drawLine(corners[1].x, corners[1].y, corners[2].x, corners[2].y); | |||
g2.drawLine(corners[2].x, corners[2].y, corners[3].x, corners[3].y); | |||
g2.drawLine(corners[3].x, corners[3].y, corners[0].x, corners[0].y); | |||
ShowImages.showWindow(output, "Stitched Images", true); | |||
} | |||
private static Point2D_I32 renderPoint( int x0, int y0, Homography2D_F64 fromBtoWork ) { | |||
Point2D_F64 result = new Point2D_F64(); | |||
HomographyPointOps_F64.transform(fromBtoWork, new Point2D_F64(x0, y0), result); | |||
return new Point2D_I32((int)result.x, (int)result.y); | |||
} | |||
/ | public static void main( String[] args ) { | ||
BufferedImage imageA, imageB; | |||
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/mountain_rotate_01.jpg")); | |||
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/mountain_rotate_03.jpg")); | |||
stitch(imageA, imageB, GrayF32.class); | |||
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/kayak_01.jpg")); | |||
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/kayak_03.jpg")); | |||
stitch(imageA, imageB, GrayF32.class); | |||
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("scale/rainforest_01.jpg")); | |||
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("scale/rainforest_02.jpg")); | |||
stitch(imageA, imageB, GrayF32.class); | |||
} | } | ||
} | |||
</syntaxhighlight> | </syntaxhighlight> | ||
Latest revision as of 15:54, 17 January 2022
- Images stitched together using example code

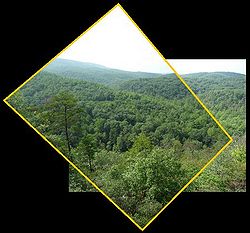
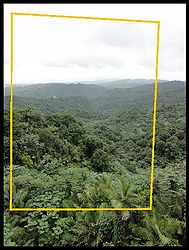



This example is designed to demonstrate several aspects of BoofCV by stitching images together. Image stitching refers to combining two or more overlapping images together into a single large image. When stitching images together the goal is to find a 2D geometric transform which minimize the error (difference in appearance) in overlapping regions. There are many ways to do this, in the example below point image features are found, associated, and then a 2D transform is found robustly using the associated features.
Example File: ExampleImageStitching.java
Concepts:
- Interest point detection
- Region descriptions
- Feature association
- Robust model fitting
- Homography
Relevant Videos:
Related Examples:
Algorithm Introduction
Described at a high level this image stitching algorithm can be summarized as follows:
- Detect and describe point features
- Associate features together
- Robust fitting to find transform
- Render combined image
The core algorithm has been coded up using abstracted code which allows different models and algorithms to be changed easily. Output examples are shown at the top of this page.
Example Code
public class ExampleImageStitching {
/**
* Using abstracted code, find a transform which minimizes the difference between corresponding features
* in both images. This code is completely model independent and is the core algorithms.
*/
public static <T extends ImageGray<T>, TD extends TupleDesc<TD>> Homography2D_F64
computeTransform( T imageA, T imageB,
DetectDescribePoint<T, TD> detDesc,
AssociateDescription<TD> associate,
ModelMatcher<Homography2D_F64, AssociatedPair> modelMatcher ) {
// get the length of the description
List<Point2D_F64> pointsA = new ArrayList<>();
DogArray<TD> descA = UtilFeature.createArray(detDesc, 100);
List<Point2D_F64> pointsB = new ArrayList<>();
DogArray<TD> descB = UtilFeature.createArray(detDesc, 100);
// extract feature locations and descriptions from each image
describeImage(imageA, detDesc, pointsA, descA);
describeImage(imageB, detDesc, pointsB, descB);
// Associate features between the two images
associate.setSource(descA);
associate.setDestination(descB);
associate.associate();
// create a list of AssociatedPairs that tell the model matcher how a feature moved
FastAccess<AssociatedIndex> matches = associate.getMatches();
List<AssociatedPair> pairs = new ArrayList<>();
for (int i = 0; i < matches.size(); i++) {
AssociatedIndex match = matches.get(i);
Point2D_F64 a = pointsA.get(match.src);
Point2D_F64 b = pointsB.get(match.dst);
pairs.add(new AssociatedPair(a, b, false));
}
// find the best fit model to describe the change between these images
if (!modelMatcher.process(pairs))
throw new RuntimeException("Model Matcher failed!");
// return the found image transform
return modelMatcher.getModelParameters().copy();
}
/**
* Detects features inside the two images and computes descriptions at those points.
*/
private static <T extends ImageGray<T>, TD extends TupleDesc<TD>>
void describeImage( T image,
DetectDescribePoint<T, TD> detDesc,
List<Point2D_F64> points,
DogArray<TD> listDescs ) {
detDesc.detect(image);
listDescs.reset();
for (int i = 0; i < detDesc.getNumberOfFeatures(); i++) {
points.add(detDesc.getLocation(i).copy());
listDescs.grow().setTo(detDesc.getDescription(i));
}
}
/**
* Given two input images create and display an image where the two have been overlayed on top of each other.
*/
public static <T extends ImageGray<T>>
void stitch( BufferedImage imageA, BufferedImage imageB, Class<T> imageType ) {
T inputA = ConvertBufferedImage.convertFromSingle(imageA, null, imageType);
T inputB = ConvertBufferedImage.convertFromSingle(imageB, null, imageType);
// Detect using the standard SURF feature descriptor and describer
DetectDescribePoint detDesc = FactoryDetectDescribe.surfStable(
new ConfigFastHessian(1, 2, 200, 1, 9, 4, 4), null, null, imageType);
ScoreAssociation<TupleDesc_F64> scorer = FactoryAssociation.scoreEuclidean(TupleDesc_F64.class, true);
AssociateDescription<TupleDesc_F64> associate = FactoryAssociation.greedy(new ConfigAssociateGreedy(true, 2), scorer);
// fit the images using a homography. This works well for rotations and distant objects.
ModelMatcher<Homography2D_F64, AssociatedPair> modelMatcher =
FactoryMultiViewRobust.homographyRansac(null, new ConfigRansac(60, 3));
Homography2D_F64 H = computeTransform(inputA, inputB, detDesc, associate, modelMatcher);
renderStitching(imageA, imageB, H);
}
/**
* Renders and displays the stitched together images
*/
public static void renderStitching( BufferedImage imageA, BufferedImage imageB,
Homography2D_F64 fromAtoB ) {
// specify size of output image
double scale = 0.5;
// Convert into a BoofCV color format
Planar<GrayF32> colorA =
ConvertBufferedImage.convertFromPlanar(imageA, null, true, GrayF32.class);
Planar<GrayF32> colorB =
ConvertBufferedImage.convertFromPlanar(imageB, null, true, GrayF32.class);
// Where the output images are rendered into
Planar<GrayF32> work = colorA.createSameShape();
// Adjust the transform so that the whole image can appear inside of it
Homography2D_F64 fromAToWork = new Homography2D_F64(scale, 0, colorA.width/4, 0, scale, colorA.height/4, 0, 0, 1);
Homography2D_F64 fromWorkToA = fromAToWork.invert(null);
// Used to render the results onto an image
PixelTransformHomography_F32 model = new PixelTransformHomography_F32();
InterpolatePixelS<GrayF32> interp = FactoryInterpolation.bilinearPixelS(GrayF32.class, BorderType.ZERO);
ImageDistort<Planar<GrayF32>, Planar<GrayF32>> distort =
DistortSupport.createDistortPL(GrayF32.class, model, interp, false);
distort.setRenderAll(false);
// Render first image
model.setTo(fromWorkToA);
distort.apply(colorA, work);
// Render second image
Homography2D_F64 fromWorkToB = fromWorkToA.concat(fromAtoB, null);
model.setTo(fromWorkToB);
distort.apply(colorB, work);
// Convert the rendered image into a BufferedImage
BufferedImage output = new BufferedImage(work.width, work.height, imageA.getType());
ConvertBufferedImage.convertTo(work, output, true);
Graphics2D g2 = output.createGraphics();
// draw lines around the distorted image to make it easier to see
Homography2D_F64 fromBtoWork = fromWorkToB.invert(null);
Point2D_I32 corners[] = new Point2D_I32[4];
corners[0] = renderPoint(0, 0, fromBtoWork);
corners[1] = renderPoint(colorB.width, 0, fromBtoWork);
corners[2] = renderPoint(colorB.width, colorB.height, fromBtoWork);
corners[3] = renderPoint(0, colorB.height, fromBtoWork);
g2.setColor(Color.ORANGE);
g2.setStroke(new BasicStroke(4));
g2.setRenderingHint(RenderingHints.KEY_ANTIALIASING, RenderingHints.VALUE_ANTIALIAS_ON);
g2.drawLine(corners[0].x, corners[0].y, corners[1].x, corners[1].y);
g2.drawLine(corners[1].x, corners[1].y, corners[2].x, corners[2].y);
g2.drawLine(corners[2].x, corners[2].y, corners[3].x, corners[3].y);
g2.drawLine(corners[3].x, corners[3].y, corners[0].x, corners[0].y);
ShowImages.showWindow(output, "Stitched Images", true);
}
private static Point2D_I32 renderPoint( int x0, int y0, Homography2D_F64 fromBtoWork ) {
Point2D_F64 result = new Point2D_F64();
HomographyPointOps_F64.transform(fromBtoWork, new Point2D_F64(x0, y0), result);
return new Point2D_I32((int)result.x, (int)result.y);
}
public static void main( String[] args ) {
BufferedImage imageA, imageB;
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/mountain_rotate_01.jpg"));
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/mountain_rotate_03.jpg"));
stitch(imageA, imageB, GrayF32.class);
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/kayak_01.jpg"));
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("stitch/kayak_03.jpg"));
stitch(imageA, imageB, GrayF32.class);
imageA = UtilImageIO.loadImageNotNull(UtilIO.pathExample("scale/rainforest_01.jpg"));
imageB = UtilImageIO.loadImageNotNull(UtilIO.pathExample("scale/rainforest_02.jpg"));
stitch(imageA, imageB, GrayF32.class);
}
}