Difference between revisions of "Example Remove Lens Distortion"
From BoofCV
Jump to navigationJump to searchm |
m |
||
| (6 intermediate revisions by the same user not shown) | |||
| Line 8: | Line 8: | ||
This example demonstrates how to load a camera's calibration from an XML file and remove lens distortion from its images. After lens distortion is removed, the new undistorted view often "pushes" pixels outside the viewing area. To compensate for this problem it is possible to adjust the view to maximize the view area based on different objectives. After adjusting the view be sure to use the new intrinsic parameters when performing geometric operations. | This example demonstrates how to load a camera's calibration from an XML file and remove lens distortion from its images. After lens distortion is removed, the new undistorted view often "pushes" pixels outside the viewing area. To compensate for this problem it is possible to adjust the view to maximize the view area based on different objectives. After adjusting the view be sure to use the new intrinsic parameters when performing geometric operations. | ||
Example File: [https://github.com/lessthanoptimal/BoofCV/blob/v0. | Example File: [https://github.com/lessthanoptimal/BoofCV/blob/v0.38/examples/src/boofcv/examples/calibration/ExampleRemoveLensDistortion.java ExampleRemoveLensDistortion.java] | ||
Concepts: | Concepts: | ||
| Line 14: | Line 14: | ||
* Calibration | * Calibration | ||
* Intrinsic Parameters | * Intrinsic Parameters | ||
Related Examples: | Related Examples: | ||
| Line 26: | Line 21: | ||
<syntaxhighlight lang="java"> | <syntaxhighlight lang="java"> | ||
/** | /** | ||
* All real camera lens have distortion. | * All real camera lens have distortion. This distortion causes large errors when attempting to recover the | ||
* scene's structure and camera's motion. | * scene's structure and camera's motion. The following example demonstrates how the lens distortion can be | ||
* removed from an image after the camera has been calibrated. | * removed from an image after the camera has been calibrated. | ||
* | * | ||
* After lens distortion has been removed the new image will not be properly contained inside the original | * After lens distortion has been removed the new image will not be properly contained inside the original | ||
* image side. | * image side. Methods are provided for scaling and translating the image to maximize the view area | ||
* using different metrics. | * using different metrics. After this adjustment has been done the new image is equivalent to one being | ||
* generated by a virtual camera with a different set of intrinsic parameters. | * generated by a virtual camera with a different set of intrinsic parameters. | ||
* | * | ||
| Line 39: | Line 34: | ||
public class ExampleRemoveLensDistortion { | public class ExampleRemoveLensDistortion { | ||
public static void main( String | public static void main( String[] args ) { | ||
String calibDir = UtilIO.pathExample("calibration/mono/Sony_DSC-HX5V_Chess/"); | String calibDir = UtilIO.pathExample("calibration/mono/Sony_DSC-HX5V_Chess/"); | ||
String imageDir = UtilIO.pathExample("structure/"); | String imageDir = UtilIO.pathExample("structure/"); | ||
// load calibration parameters from the previously calibrated camera | // load calibration parameters from the previously calibrated camera | ||
CameraPinholeBrown param = CalibrationIO.load(new File(calibDir , "intrinsic.yaml")); | |||
// Specify a transform that has no lens distortion that you wish to re-render the image as having | |||
CameraPinhole desired = new CameraPinhole(param); | |||
// load images and convert the image into a color BoofCV format | // load images and convert the image into a color BoofCV format | ||
BufferedImage orig = UtilImageIO.loadImage(imageDir , "dist_cyto_01.jpg"); | BufferedImage orig = UtilImageIO.loadImage(imageDir , "dist_cyto_01.jpg"); | ||
Planar<GrayF32> distortedImg = | |||
ConvertBufferedImage. | ConvertBufferedImage.convertFromPlanar(orig, null,true, GrayF32.class); | ||
int numBands = distortedImg.getNumBands(); | int numBands = distortedImg.getNumBands(); | ||
// create new transforms which optimize view area in different ways. | // create new transforms which optimize view area in different ways. | ||
// | // EXPAND makes sure there are no black outside of image pixels inside the image | ||
// | // FULL_VIEW will include the entire original image | ||
// The border is VALUE, which defaults to black, just so you can see it | // The border is VALUE, which defaults to black, just so you can see it | ||
ImageDistort allInside = LensDistortionOps. | ImageDistort allInside = LensDistortionOps.changeCameraModel(AdjustmentType.EXPAND, BorderType.ZERO, | ||
param, desired,null, ImageType.pl(numBands, GrayF32.class)); | |||
ImageDistort fullView = LensDistortionOps. | ImageDistort fullView = LensDistortionOps.changeCameraModel(AdjustmentType.FULL_VIEW, BorderType.ZERO, | ||
param, desired, null, ImageType.pl(numBands, GrayF32.class)); | |||
// NOTE: After lens distortion has been removed the intrinsic parameters is changed. | // NOTE: After lens distortion has been removed the intrinsic parameters is changed. If you pass | ||
// in a set of IntrinsicParameters to the 4th variable it will save it there. | // in a set of IntrinsicParameters to the 4th variable it will save it there. | ||
// NOTE: Type information was stripped from ImageDistort simply because it becomes too verbose with it here. | // NOTE: Type information was stripped from ImageDistort simply because it becomes too verbose with it here. | ||
| Line 75: | Line 72: | ||
*/ | */ | ||
private static void displayResults(BufferedImage orig, | private static void displayResults(BufferedImage orig, | ||
Planar<GrayF32> distortedImg, | |||
ImageDistort allInside, ImageDistort fullView ) { | ImageDistort allInside, ImageDistort fullView ) { | ||
// render the results | // render the results | ||
Planar<GrayF32> undistortedImg = new Planar<>(GrayF32.class, | |||
distortedImg.getWidth(),distortedImg.getHeight(),distortedImg.getNumBands()); | distortedImg.getWidth(),distortedImg.getHeight(),distortedImg.getNumBands()); | ||
Latest revision as of 10:15, 12 July 2021
- Images with lens distortion removed
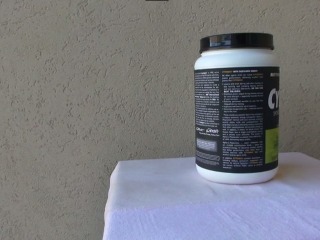
Adjusted to maximize the view without including "black" pixels.
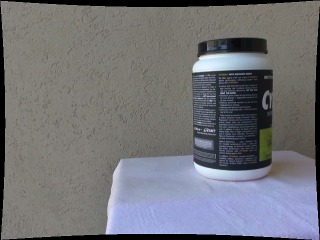
Adjusted so that the entire original image can be viewed.


This example demonstrates how to load a camera's calibration from an XML file and remove lens distortion from its images. After lens distortion is removed, the new undistorted view often "pushes" pixels outside the viewing area. To compensate for this problem it is possible to adjust the view to maximize the view area based on different objectives. After adjusting the view be sure to use the new intrinsic parameters when performing geometric operations.
Example File: ExampleRemoveLensDistortion.java
Concepts:
- Lens Distortion
- Calibration
- Intrinsic Parameters
Related Examples:
Example Code
/**
* All real camera lens have distortion. This distortion causes large errors when attempting to recover the
* scene's structure and camera's motion. The following example demonstrates how the lens distortion can be
* removed from an image after the camera has been calibrated.
*
* After lens distortion has been removed the new image will not be properly contained inside the original
* image side. Methods are provided for scaling and translating the image to maximize the view area
* using different metrics. After this adjustment has been done the new image is equivalent to one being
* generated by a virtual camera with a different set of intrinsic parameters.
*
* @author Peter Abeles
*/
public class ExampleRemoveLensDistortion {
public static void main( String[] args ) {
String calibDir = UtilIO.pathExample("calibration/mono/Sony_DSC-HX5V_Chess/");
String imageDir = UtilIO.pathExample("structure/");
// load calibration parameters from the previously calibrated camera
CameraPinholeBrown param = CalibrationIO.load(new File(calibDir , "intrinsic.yaml"));
// Specify a transform that has no lens distortion that you wish to re-render the image as having
CameraPinhole desired = new CameraPinhole(param);
// load images and convert the image into a color BoofCV format
BufferedImage orig = UtilImageIO.loadImage(imageDir , "dist_cyto_01.jpg");
Planar<GrayF32> distortedImg =
ConvertBufferedImage.convertFromPlanar(orig, null,true, GrayF32.class);
int numBands = distortedImg.getNumBands();
// create new transforms which optimize view area in different ways.
// EXPAND makes sure there are no black outside of image pixels inside the image
// FULL_VIEW will include the entire original image
// The border is VALUE, which defaults to black, just so you can see it
ImageDistort allInside = LensDistortionOps.changeCameraModel(AdjustmentType.EXPAND, BorderType.ZERO,
param, desired,null, ImageType.pl(numBands, GrayF32.class));
ImageDistort fullView = LensDistortionOps.changeCameraModel(AdjustmentType.FULL_VIEW, BorderType.ZERO,
param, desired, null, ImageType.pl(numBands, GrayF32.class));
// NOTE: After lens distortion has been removed the intrinsic parameters is changed. If you pass
// in a set of IntrinsicParameters to the 4th variable it will save it there.
// NOTE: Type information was stripped from ImageDistort simply because it becomes too verbose with it here.
// Would be nice if this verbosity issue was addressed by the Java language.
// render and display the different types of views in a window
displayResults(orig, distortedImg, allInside, fullView );
}
/**
* Displays results in a window for easy comparison..
*/
private static void displayResults(BufferedImage orig,
Planar<GrayF32> distortedImg,
ImageDistort allInside, ImageDistort fullView ) {
// render the results
Planar<GrayF32> undistortedImg = new Planar<>(GrayF32.class,
distortedImg.getWidth(),distortedImg.getHeight(),distortedImg.getNumBands());
allInside.apply(distortedImg, undistortedImg);
BufferedImage out1 = ConvertBufferedImage.convertTo(undistortedImg, null,true);
fullView.apply(distortedImg,undistortedImg);
BufferedImage out2 = ConvertBufferedImage.convertTo(undistortedImg, null,true);
// display in a single window where the user can easily switch between images
ListDisplayPanel panel = new ListDisplayPanel();
panel.addItem(new ImagePanel(orig), "Original");
panel.addItem(new ImagePanel(out1), "Undistorted All Inside");
panel.addItem(new ImagePanel(out2), "Undistorted Full View");
ShowImages.showWindow(panel, "Removing Lens Distortion", true);
}
}