Difference between revisions of "Example Point Cloud Depth Image"
From BoofCV
Jump to navigationJump to searchm |
m |
||
| (4 intermediate revisions by the same user not shown) | |||
| Line 9: | Line 9: | ||
Example Code: | Example Code: | ||
* [https://github.com/lessthanoptimal/BoofCV/blob/v0. | * [https://github.com/lessthanoptimal/BoofCV/blob/v0.40/examples/src/main/java/boofcv/examples/geometry/ExampleDepthPointCloud.java ExampleDepthPointCloud.java] | ||
Concepts: | Concepts: | ||
| Line 22: | Line 22: | ||
<syntaxhighlight lang="java"> | <syntaxhighlight lang="java"> | ||
/** | /** | ||
* Example of how to create a point cloud from a RGB-D (Kinect) sensor. | * Example of how to create a point cloud from a RGB-D (Kinect) sensor. Data is loaded from two files, one for the | ||
* visual image and one for the depth image. | * visual image and one for the depth image. | ||
* | * | ||
| Line 28: | Line 28: | ||
*/ | */ | ||
public class ExampleDepthPointCloud { | public class ExampleDepthPointCloud { | ||
public static void main( String[] args ) { | |||
public static void main( String | |||
String nameRgb = UtilIO.pathExample("kinect/basket/basket_rgb.png"); | String nameRgb = UtilIO.pathExample("kinect/basket/basket_rgb.png"); | ||
String nameDepth = UtilIO.pathExample("kinect/basket/basket_depth.png"); | String nameDepth = UtilIO.pathExample("kinect/basket/basket_depth.png"); | ||
| Line 36: | Line 35: | ||
VisualDepthParameters param = CalibrationIO.load(nameCalib); | VisualDepthParameters param = CalibrationIO.load(nameCalib); | ||
BufferedImage buffered = UtilImageIO. | BufferedImage buffered = UtilImageIO.loadImageNotNull(nameRgb); | ||
Planar<GrayU8> rgb = ConvertBufferedImage.convertFromPlanar(buffered,null,true,GrayU8.class); | Planar<GrayU8> rgb = ConvertBufferedImage.convertFromPlanar(buffered, null, true, GrayU8.class); | ||
GrayU16 depth = | GrayU16 depth = ConvertBufferedImage.convertFrom(UtilImageIO.loadImageNotNull(nameDepth), null, GrayU16.class); | ||
var cloud = new DogArray<>(Point3D_F64::new); | |||
var cloudColor = new DogArray<>(() -> new int[3]); | |||
VisualDepthOps.depthTo3D(param.visualParam, rgb, depth, cloud, cloudColor); | VisualDepthOps.depthTo3D(param.visualParam, rgb, depth, cloud, cloudColor); | ||
| Line 50: | Line 48: | ||
viewer.setTranslationStep(15); | viewer.setTranslationStep(15); | ||
for( int i = 0; i < cloud.size; i++ ) { | for (int i = 0; i < cloud.size; i++) { | ||
Point3D_F64 p = cloud.get(i); | Point3D_F64 p = cloud.get(i); | ||
int[] color = cloudColor.get(i); | int[] color = cloudColor.get(i); | ||
int c = (color[0] << 16 ) | (color[1] << 8) | color[2]; | int c = (color[0] << 16) | (color[1] << 8) | color[2]; | ||
viewer.addPoint(p.x,p.y,p.z,c); | viewer.addPoint(p.x, p.y, p.z, c); | ||
} | } | ||
viewer.getComponent().setPreferredSize(new Dimension(rgb.width,rgb.height)); | viewer.getComponent().setPreferredSize(new Dimension(rgb.width, rgb.height)); | ||
// ---------- Display depth image | // ---------- Display depth image | ||
// use the actual max value in the image to maximize its appearance | // use the actual max value in the image to maximize its appearance | ||
int maxValue = ImageStatistics.max(depth); | int maxValue = ImageStatistics.max(depth); | ||
BufferedImage depthOut = VisualizeImageData.disparity(depth, null | BufferedImage depthOut = VisualizeImageData.disparity(depth, null, maxValue, 0); | ||
ShowImages.showWindow(depthOut,"Depth Image", true); | ShowImages.showWindow(depthOut, "Depth Image", true); | ||
// ---------- Display colorized point cloud | // ---------- Display colorized point cloud | ||
ShowImages.showWindow(viewer.getComponent(),"Point Cloud", true); | ShowImages.showWindow(viewer.getComponent(), "Point Cloud", true); | ||
System.out.println("Total points = "+cloud.size); | System.out.println("Total points = " + cloud.size); | ||
} | } | ||
} | } | ||
</syntaxhighlight> | </syntaxhighlight> | ||
Latest revision as of 15:54, 17 January 2022
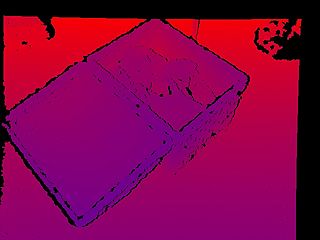
Depth image from Kinect sensor
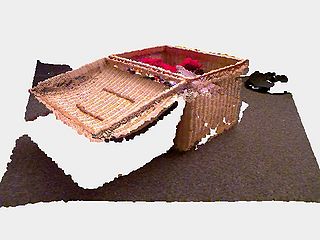
3D point cloud created from RGB and depth images


This example demonstrates how to create a 3D point cloud from a RGB-D sensor, such as the Kinect, and visualize it. RGB-D sensors have both visual and depth information. In this example the depth information is stored in a 16-bit image and the visual image in a standard color image. Calibration matching RGB an depth pixels to each other has already been done by the sensor.
Example Code:
Concepts:
- RGB-D
- Point clouds
Related Examples:
Example Code
/**
* Example of how to create a point cloud from a RGB-D (Kinect) sensor. Data is loaded from two files, one for the
* visual image and one for the depth image.
*
* @author Peter Abeles
*/
public class ExampleDepthPointCloud {
public static void main( String[] args ) {
String nameRgb = UtilIO.pathExample("kinect/basket/basket_rgb.png");
String nameDepth = UtilIO.pathExample("kinect/basket/basket_depth.png");
String nameCalib = UtilIO.pathExample("kinect/basket/visualdepth.yaml");
VisualDepthParameters param = CalibrationIO.load(nameCalib);
BufferedImage buffered = UtilImageIO.loadImageNotNull(nameRgb);
Planar<GrayU8> rgb = ConvertBufferedImage.convertFromPlanar(buffered, null, true, GrayU8.class);
GrayU16 depth = ConvertBufferedImage.convertFrom(UtilImageIO.loadImageNotNull(nameDepth), null, GrayU16.class);
var cloud = new DogArray<>(Point3D_F64::new);
var cloudColor = new DogArray<>(() -> new int[3]);
VisualDepthOps.depthTo3D(param.visualParam, rgb, depth, cloud, cloudColor);
PointCloudViewer viewer = VisualizeData.createPointCloudViewer();
viewer.setCameraHFov(PerspectiveOps.computeHFov(param.visualParam));
viewer.setTranslationStep(15);
for (int i = 0; i < cloud.size; i++) {
Point3D_F64 p = cloud.get(i);
int[] color = cloudColor.get(i);
int c = (color[0] << 16) | (color[1] << 8) | color[2];
viewer.addPoint(p.x, p.y, p.z, c);
}
viewer.getComponent().setPreferredSize(new Dimension(rgb.width, rgb.height));
// ---------- Display depth image
// use the actual max value in the image to maximize its appearance
int maxValue = ImageStatistics.max(depth);
BufferedImage depthOut = VisualizeImageData.disparity(depth, null, maxValue, 0);
ShowImages.showWindow(depthOut, "Depth Image", true);
// ---------- Display colorized point cloud
ShowImages.showWindow(viewer.getComponent(), "Point Cloud", true);
System.out.println("Total points = " + cloud.size);
}
}