Difference between revisions of "Example Detect Corners"
From BoofCV
Jump to navigationJump to search (Created page with "<center> <gallery widths=640px heights=260px> file:Example_corner_points.png | Detected Shi-Tomasi corner points. </gallery> </center> Corner features and other point feature...") |
m |
||
| Line 8: | Line 8: | ||
Example Code: | Example Code: | ||
* [https://github.com/lessthanoptimal/BoofCV/blob/v0. | * [https://github.com/lessthanoptimal/BoofCV/blob/v0.37/examples/src/boofcv/examples/features/ExampleCornerFeature.java ExampleCornerFeature.java] | ||
Concepts: | Concepts: | ||
Revision as of 12:57, 21 December 2020
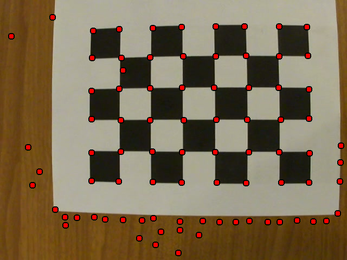
Detected Shi-Tomasi corner points.

Corner features and other point features (e.g. Laplacian) are commonly used in SFM and 2D geometric applications. Perhaps the most well known corner feature is Shi-Tomasi (a.k.a. Good Features) and Harris corner features.
Example Code:
Concepts:
- Image Features
- SFM
Example Code
/**
* Example showing how corner features can be detected. These features are not scale invariant, but are
* fast to compute. In OpenCV Shi-Tomasi has the name of goodFeaturesToTrack and uses the unweighted variant.
*
* @author Peter Abeles
*/
public class ExampleCornerFeature {
public static void main(String[] args) {
ConfigGeneralDetector configNonMax = new ConfigGeneralDetector();
// a large radius is used to exaggerate weighted/unweighted affects. Try 1 or 2 for a typical value
configNonMax.radius = 10;
configNonMax.threshold = 100;
configNonMax.maxFeatures = 100;
ConfigShiTomasi configCorner = new ConfigShiTomasi();
configCorner.radius = configNonMax.radius; // in general you should use the same radius here
configCorner.weighted = true; // weighted corners will appear at the corners on a chessboard
// set weighted to false and see what happens to the feature's locations. unweighted is much faster
GeneralFeatureDetector<GrayU8,GrayS16> detector = FactoryDetectPoint.createShiTomasi(configNonMax,configCorner, GrayS16.class);
ImageGradient<GrayU8, GrayS16> sobel = FactoryDerivative.sobel(GrayU8.class,GrayS16.class);
BufferedImage image = UtilImageIO.loadImage(UtilIO.pathExample("calibration/mono/Sony_DSC-HX5V_Chess/frame05.jpg"));
// Convert the image into a usable format and predeclare memory
GrayU8 gray = ConvertBufferedImage.convertFrom(image,(GrayU8)null);
GrayS16 derivX = new GrayS16(gray.width,gray.height);
GrayS16 derivY = new GrayS16(gray.width,gray.height);
// The first image derivatives are needed
sobel.process(gray, derivX,derivY);
// Compute the corners
detector.process(gray,derivX,derivY,null,null,null);
// Visualize the results
QueueCorner corners = detector.getMaximums();
Graphics2D g2 = image.createGraphics();
for (int i = 0; i < corners.size; i++) {
Point2D_I16 c = corners.get(i);
VisualizeFeatures.drawPoint(g2,c.x,c.y,4,Color.RED,true);
}
ShowImages.showWindow(image,"Corners",true);
}
}