Difference between revisions of "Example Fiducial Square Binary"
From BoofCV
Jump to navigationJump to searchm |
m |
||
| Line 8: | Line 8: | ||
Example Code: | Example Code: | ||
* [https://github.com/lessthanoptimal/BoofCV/blob/v0. | * [https://github.com/lessthanoptimal/BoofCV/blob/v0.40/examples/src/main/java/boofcv/examples/fiducial/ExampleFiducialBinary.java ExampleFiducialBinary.java] | ||
Concepts: | Concepts: | ||
| Line 26: | Line 26: | ||
<syntaxhighlight lang="java"> | <syntaxhighlight lang="java"> | ||
** | |||
* Detects square binary fiducials inside an image, writes out there pose, and visualizes a virtual flat cube | * Detects square binary fiducials inside an image, writes out there pose, and visualizes a virtual flat cube | ||
* above them in the input image. | * above them in the input image. | ||
| Line 40: | Line 40: | ||
// load the lens distortion parameters and the input image | // load the lens distortion parameters and the input image | ||
CameraPinholeBrown param = CalibrationIO.load(new File(directory, "intrinsic.yaml")); | CameraPinholeBrown param = CalibrationIO.load(new File(directory, "intrinsic.yaml")); | ||
var lensDistortion = new LensDistortionBrown(param); | |||
BufferedImage input = UtilImageIO. | BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0000.jpg"); | ||
// BufferedImage input = UtilImageIO. | // BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0001.jpg"); | ||
// BufferedImage input = UtilImageIO. | // BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0002.jpg"); | ||
GrayF32 original = ConvertBufferedImage.convertFrom(input, true, ImageType.single(GrayF32.class)); | GrayF32 original = ConvertBufferedImage.convertFrom(input, true, ImageType.single(GrayF32.class)); | ||
| Line 57: | Line 57: | ||
// print the results | // print the results | ||
Graphics2D g2 = input.createGraphics(); | Graphics2D g2 = input.createGraphics(); | ||
var targetToSensor = new Se3_F64(); | |||
var locationPixel = new Point2D_F64(); | |||
var bounds = new Polygon2D_F64(); | |||
for (int i = 0; i < detector.totalFound(); i++) { | for (int i = 0; i < detector.totalFound(); i++) { | ||
detector.getCenter(i, locationPixel); | detector.getCenter(i, locationPixel); | ||
Latest revision as of 14:42, 17 January 2022
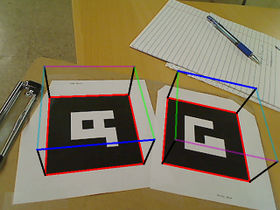
Rendered 3D flat squares on top of fiducials

Demonstration how to detect square binary fiducials. Square binary fiducials encode a pattern in the fiducial's center which can describe up to 4096 unique targets.
Example Code:
Concepts:
- Fiducials
- Pose estimation
Relevant Examples/Tutorials:
- Tutorial Fiducials
- Example Fiducial Square Hamming
- Example Fiducial Square Image
- Example Fiducial Calibration Target
Videos
Example Code
**
* Detects square binary fiducials inside an image, writes out there pose, and visualizes a virtual flat cube
* above them in the input image.
*
* These markers can have issues with noise and you might want to consider using ExampleFiducialHamming instead.
*
* @author Peter Abeles
*/
public class ExampleFiducialBinary {
public static void main( String[] args ) {
String directory = UtilIO.pathExample("fiducial/binary");
// load the lens distortion parameters and the input image
CameraPinholeBrown param = CalibrationIO.load(new File(directory, "intrinsic.yaml"));
var lensDistortion = new LensDistortionBrown(param);
BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0000.jpg");
// BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0001.jpg");
// BufferedImage input = UtilImageIO.loadImageNotNull(directory, "image0002.jpg");
GrayF32 original = ConvertBufferedImage.convertFrom(input, true, ImageType.single(GrayF32.class));
// Detect the fiducial
FiducialDetector<GrayF32> detector = FactoryFiducial.squareBinary(
new ConfigFiducialBinary(0.1), ConfigThreshold.local(ThresholdType.LOCAL_MEAN, 21), GrayF32.class);
// new ConfigFiducialBinary(0.1), ConfigThreshold.fixed(100),GrayF32.class);
detector.setLensDistortion(lensDistortion, param.width, param.height);
detector.detect(original);
// print the results
Graphics2D g2 = input.createGraphics();
var targetToSensor = new Se3_F64();
var locationPixel = new Point2D_F64();
var bounds = new Polygon2D_F64();
for (int i = 0; i < detector.totalFound(); i++) {
detector.getCenter(i, locationPixel);
detector.getBounds(i, bounds);
g2.setColor(new Color(50, 50, 255));
g2.setStroke(new BasicStroke(10));
VisualizeShapes.drawPolygon(bounds, true, 1.0, g2);
if (detector.hasID())
System.out.println("Target ID = " + detector.getId(i));
if (detector.hasMessage())
System.out.println("Message = " + detector.getMessage(i));
System.out.println("2D Image Location = " + locationPixel);
if (detector.is3D()) {
detector.getFiducialToCamera(i, targetToSensor);
System.out.println("3D Location:");
System.out.println(targetToSensor);
VisualizeFiducial.drawCube(targetToSensor, param, detector.getWidth(i), 3, g2);
VisualizeFiducial.drawLabelCenter(targetToSensor, param, "" + detector.getId(i), g2);
} else {
VisualizeFiducial.drawLabel(locationPixel, "" + detector.getId(i), g2);
}
}
ShowImages.showWindow(input, "Fiducials", true);
}
}