Example Calibrate Planar Mono
From BoofCV
Jump to navigationJump to searchMonocular Camera Calibration with Planar Targets
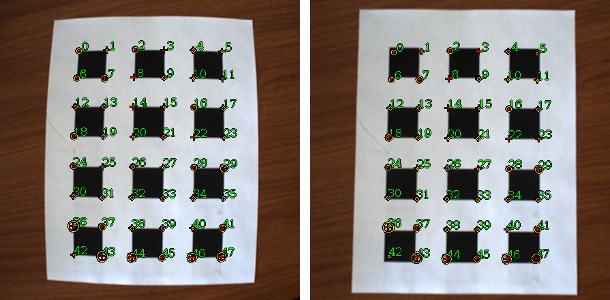
Left uncalibrated. Right calibrated with lens distortion removed. Numbers are super imposed on the image to show calibration points.

Calibrating a monocular (single) camera is the process of learning its intrinsic camera parameters and removing lens distortion. This example demonstrates how to use multiple pictures of a planar calibration target. Both the square grid and chessboard patterns are supported by this example. For a full description of the calibration process and instruction on how to do it yourself see the tutorial linked to below.
Example File: ExampleCalibrateMonocularPlanar.java
Calibration Tutorial: Wikipage
Concepts:
- Camera calibration
- Lens distortion
- Intrinsic parameters
Relevant Applets:
Related Examples:
Example Code
/**
* <p>
* Example of how to calibrate a single (monocular) camera using a planar calibration grid. The intrinsic camera
* parameters and lens distortion are estimated. Both square grid and chessboard targets are demonstrated by this
* example. See calibration tutorial for a discussion of different target types and how to collect good calibration
* images.
* </p>
*
* <<p>
* All the image processing and calibration is taken care of inside of {@link CalibrateMonoPlanar}. The code below
* loads calibration images as inputs, calibrates, and saves results to an XML file. See in code comments for tuning
* and implementation issues.
* </p>
*
* @see CalibrateMonoPlanar
*
* @author Peter Abeles
*/
public class ExampleCalibrateMonocularPlanar {
// Detects the target and calibration point inside the target
PlanarCalibrationDetector detector;
// Description of the target's physical dimension
PlanarCalibrationTarget target;
// List of calibration images
List<String> images;
// Most computer images are in a left handed coordinate system. If set to true it will be changed into
// a right handed coordinate system to make processing with 3D vision algorithms easier. Not always needed
// for processing monocular images.
boolean isLeftHanded;
/**
* Images from Zhang's website. Square grid pattern.
*/
private void setupZhang99() {
// Use the wrapper below for square grid targets.
detector = new WrapPlanarGridTarget(8,8);
// physical description
target = FactoryPlanarCalibrationTarget.gridSquare(8, 8, 0.5, 7.0 / 18.0);
// load image list
String directory = "../data/evaluation/calibration/mono/PULNiX_CCD_6mm_Zhang";
images = BoofMiscOps.directoryList(directory,"CalibIm");
// standard image format
isLeftHanded = true;
}
/**
* Images collected from a Bumblee Bee stereo camera. Large amounts of radial distortion. Chessboard pattern.
*/
private void setupBumbleBee() {
// Use the wrapper below for chessboard targets. The last parameter adjusts the size of the corner detection
// region. TUNE THIS PARAMETER FOR OPTIMAL ACCURACY!
detector = new WrapPlanarChessTarget(3,4,6);
// physical description
target = FactoryPlanarCalibrationTarget.gridChess(3, 4, 30);
// load image list
String directory = "../data/evaluation/calibration/stereo/Bumblebee2_Chess";
images = BoofMiscOps.directoryList(directory,"left");
// standard image format
isLeftHanded = true;
}
/**
* Process calibration images, compute intrinsic parameters, save to a file
*/
public void process() {
// Declare and setup the calibration algorithm
CalibrateMonoPlanar calibrationAlg = new CalibrateMonoPlanar(detector,isLeftHanded);
// tell it type type of target and which parameters to estimate
calibrationAlg.configure(target, true, 2);
for( String n : images ) {
BufferedImage input = UtilImageIO.loadImage(n);
if( n != null ) {
ImageFloat32 image = ConvertBufferedImage.convertFrom(input,(ImageFloat32)null);
calibrationAlg.addImage(image);
}
}
// process and compute intrinsic parameters
IntrinsicParameters intrinsic = calibrationAlg.process();
// save results to a file and print out
BoofMiscOps.saveXML(intrinsic, "intrinsic.xml");
calibrationAlg.printStatistics();
System.out.println();
System.out.println("--- Intrinsic Parameters ---");
System.out.println();
intrinsic.print();
}
public static void main( String args[] ) {
ExampleCalibrateMonocularPlanar alg = new ExampleCalibrateMonocularPlanar();
// which target should it process
// alg.setupZhang99();
alg.setupBumbleBee();
// compute and save results
alg.process();
}
}