File list
From BoofCV
Jump to navigationJump to searchThis special page shows all uploaded files.
{kind=link}
{kind=link}
| Date | Name | Thumbnail | Size | User | Description | Versions |
|---|---|---|---|---|---|---|
| 19:54, 7 December 2016 | Example nonmax r10 threshold.png (file) |  |
95 KB | Peter | non-maximum suppression with a radius of 10 and thresholding | 1 |
| 19:52, 7 December 2016 | Example nonmax r3.png (file) |  |
100 KB | Peter | Example of found maximums with a radius of 3 | 1 |
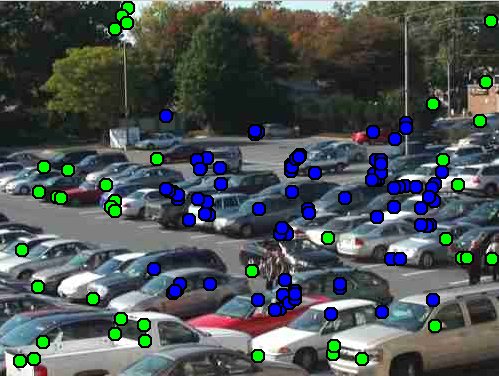
| 19:53, 7 December 2016 | Example nonmax r3 threshold.png (file) |  |
90 KB | Peter | Example of found maximums with a radius of 3 | 1 |
| 16:43, 25 December 2013 | Example overhead input.jpg (file) |  |
33 KB | Peter | Input image for computation of an overhead view. | 1 |
| 16:44, 25 December 2013 | Example overhead output.jpg (file) |  |
35 KB | Peter | Synthetic overhead view created from input image and known ground plane. | 1 |
| 23:51, 19 January 2018 | Example point based deformation man.mp4 (file) | 124 KB | Peter | Example of a man being deformed to make it look like its waving | 1 | |
| 20:40, 7 December 2016 | Example polynomial eye.jpg (file) |  |
14 KB | Peter | Polynomial interpolation being used to enlarge an image. | 1 |
| 08:16, 1 November 2011 | Example pyramid.jpg (file) |  |
35 KB | Peter | Visualization of a discrete image pyramid. | 1 |
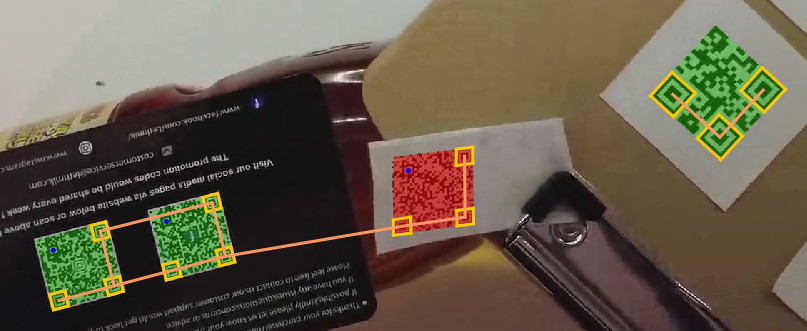
| 22:50, 19 January 2018 | Example qrcode detection.jpg (file) |  |
67 KB | Peter | Several QR Codes are detected in this image. Correctly decoded ones are highlighted in green and failures in red. Graph of connected position patterns is also shown. | 1 |
| 09:17, 4 June 2021 | Example reconstruction slippers.jpg (file) |  |
120 KB | Peter | 1 | |
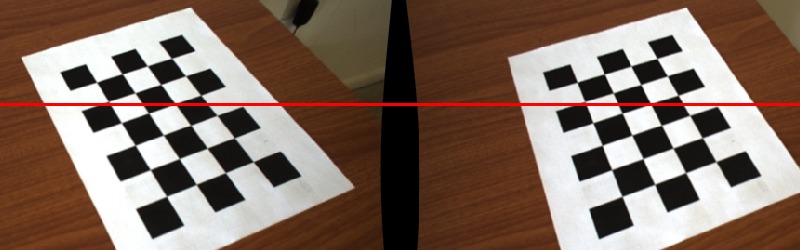
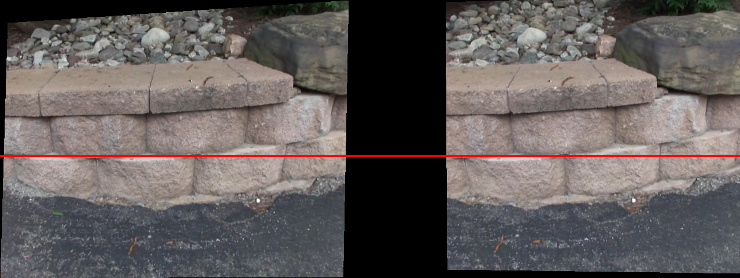
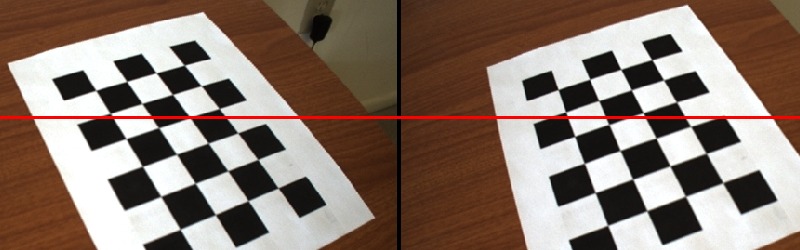
| 12:26, 18 April 2012 | Example rectified.jpg (file) |  |
49 KB | Peter | Example of a rectified pair of stereo images from a calibrated camera. Note how the y-coordinate of feature's line up? | 1 |
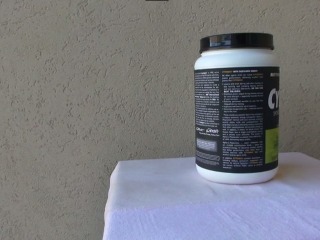
| 17:15, 25 December 2013 | Example remove perspective input.jpg (file) |  |
48 KB | Peter | Input file for removing perspective example. Note how the billboard is slanted. | 1 |
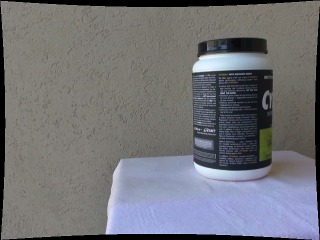
| 17:17, 25 December 2013 | Example remove perspective output.jpg (file) |  |
56 KB | Peter | Output image after a homography is used to remap the billboard and remove perspective distortion. | 1 |
| 17:30, 2 September 2022 | Example render aztec code.png (file) |  |
4 KB | Peter | 1 | |
| 15:33, 17 January 2022 | Example render microqr.png (file) |  |
9 KB | Peter | 1 | |
| 23:00, 19 January 2018 | Example rendered qrcode.png (file) |  |
4 KB | Peter | Example of a generated qr code. It reads "This is a Test ん鞠" | 1 |
| 12:28, 12 July 2021 | Example scene recognition.jpg (file) |  |
136 KB | Peter | 1 | |
| 20:26, 18 June 2014 | Example sfm chair.jpg (file) |  |
45 KB | Peter | Point cloud created from interest points from 20 images. | 1 |
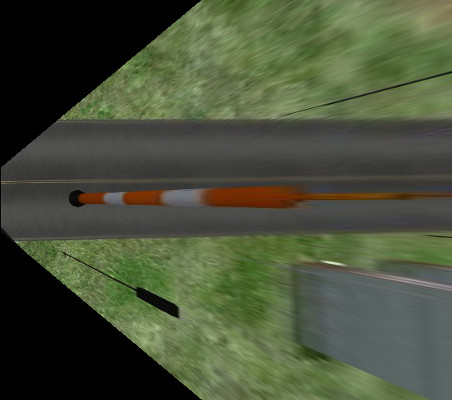
| 20:23, 8 October 2021 | Example simulate motion blur 01.jpg (file) |  |
22 KB | Peter | 1 | |
| 20:23, 8 October 2021 | Example simulate motion blur 02.jpg (file) |  |
22 KB | Peter | 1 | |
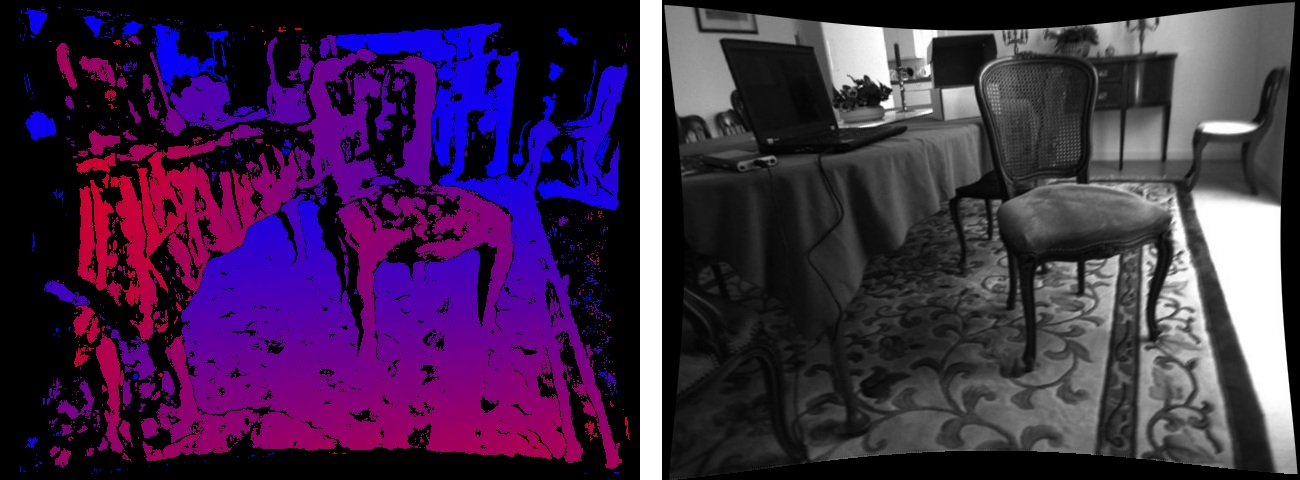
| 20:53, 12 May 2012 | Example stereo disparity.jpg (file) |  |
191 KB | Peter | Disparity shown as a colored histogram from two calibrated rectified stereo images. Hot colors indicate a close object while cool indicates distant objects. | 1 |
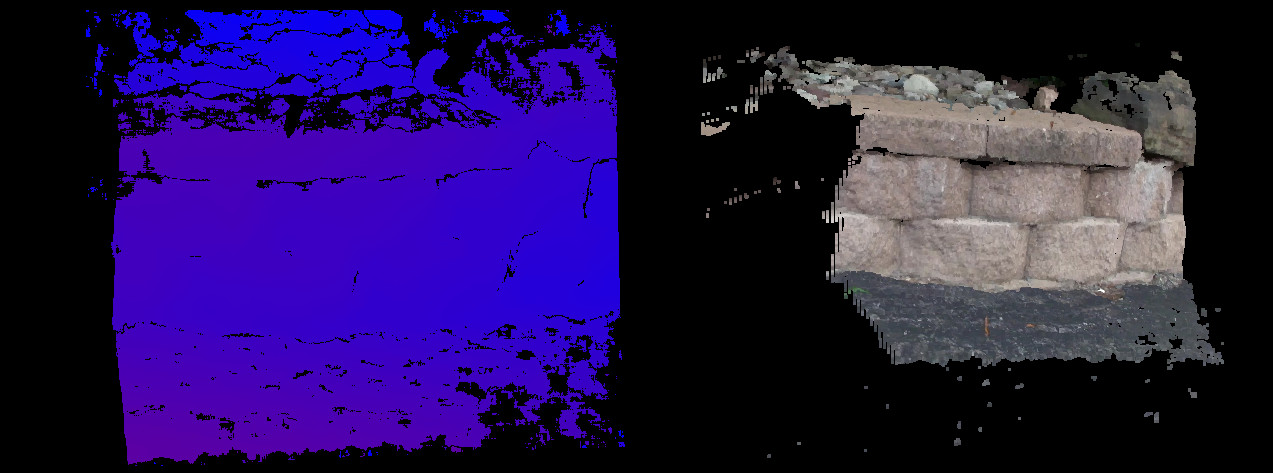
| 06:10, 15 April 2013 | Example stereo disparity3d pointcloud.jpg (file) |  |
29 KB | Peter | Point cloud used to generate a synthetic view of the scene. Created using a stereo camera. | 1 |
| 21:24, 26 December 2018 | Example stereo uncalibrated.jpg (file) |  |
136 KB | Peter | 1 | |
| 05:58, 16 September 2015 | Example template intensity.jpg (file) |  |
30 KB | Peter | 2 | |
| 05:57, 16 September 2015 | Example template matches.jpg (file) |  |
48 KB | Peter | 2 | |
| 10:31, 12 July 2021 | Example three view association.jpg (file) |  |
581 KB | Peter | 1 | |
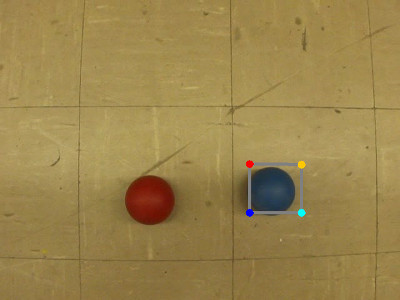
| 11:42, 26 December 2013 | Example tracking meanshift.jpg (file) |  |
24 KB | Peter | Last frame from a video sequence where mean-shift was used to track a color ball. | 1 |
| 11:50, 26 December 2013 | Example tracking object.jpg (file) |  |
39 KB | Peter | Last frame from a sequence where the book was tracked using the circulant tracker. | 1 |
| 18:18, 22 November 2011 | Example tracking points.jpg (file) |  |
57 KB | Peter | Output from point feature tracking example | 1 |
| 21:38, 26 December 2018 | Example trifocal stereo uncalibrated.jpg (file) |  |
158 KB | Peter | 1 | |
| 15:08, 16 February 2013 | Example uncalibrated rectification.jpg (file) |  |
93 KB | Peter | Better example image that is less pathological | 2 |
| 15:57, 18 April 2012 | Example undistorted allinside.jpg (file) |  |
19 KB | Peter | Lens distortion has been removed from the image and it has been adjusted to maximize the view region without including pixels outside the original view. | 1 |
| 15:59, 18 April 2012 | Example undistorted fullview.jpg (file) |  |
21 KB | Peter | Lens distortion has been removed from the image and adjusted so that the entire original image can be seen. The black regions are an artifact of removing lens distortion. | 1 |
| 12:27, 18 April 2012 | Example unrectified.jpg (file) |  |
52 KB | Peter | Example of two stereo images before rectification. Note how the y-coordinate of feature do not line up. | 1 |
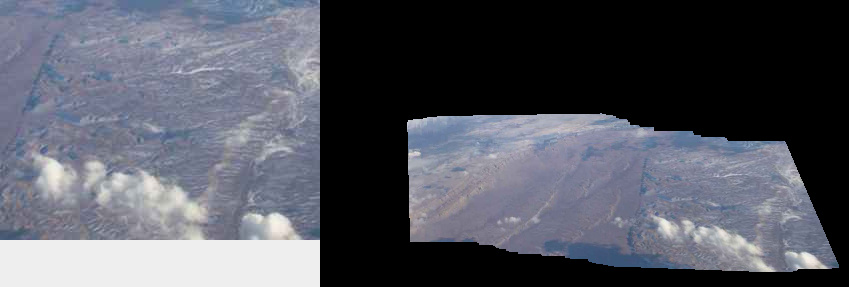
| 13:58, 14 April 2013 | Example video mosaic.jpg (file) |  |
44 KB | Peter | 2 | |
| 17:42, 25 December 2013 | Example video stabilization.jpg (file) |  |
58 KB | Peter | Input image on the left and stabilized image on the right. Hard to tell from a single image, but it has been stabilized. | 1 |
| 19:27, 3 September 2014 | Fiducial square binary detected.jpg (file) |  |
135 KB | Peter | 1 | |
| 18:46, 9 September 2014 | Fiducial square image.png (file) |  |
2 KB | Peter | 3 | |
| 18:42, 9 September 2014 | Fiducial squre binary.png (file) |  |
1 KB | Peter | 2 | |
| 13:04, 19 September 2015 | Fingerprint.jpg (file) |  |
36 KB | Peter | Standard finger print image | 1 |
| 15:26, 1 December 2016 | Fisheye to pinhole front.jpg (file) |  |
66 KB | Peter | Synthetic pinhole view generated from a fisheye camera | 1 |
| 15:26, 1 December 2016 | Fisheye to pinhole right.jpg (file) |  |
65 KB | Peter | Synthetic pinhole view generated from a fisheye camera | 1 |
| 15:12, 1 December 2016 | Front table.jpg (file) |  |
153 KB | Peter | Front fisheye image from RICOH THETA S | 1 |
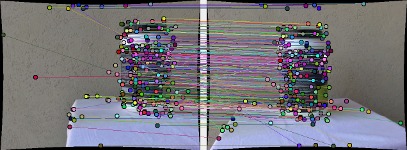
| 10:24, 18 April 2012 | Fundamental matches all.jpg (file) |  |
29 KB | Peter | Original set of feature matches before applying the epipolar constraint (Fundamental matrix). | 1 |
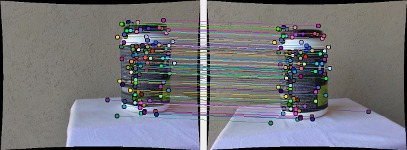
| 10:23, 18 April 2012 | Fundamental matches inliers.jpg (file) |  |
24 KB | Peter | Set of matched features after fundamental matrix has been computed using a robust algorithm. | 1 |
| 14:58, 1 December 2016 | Half dome pinhole 0.jpg (file) |  |
51 KB | Peter | Synthetic pinhole camera view from an equirectangular image | 1 |
| 15:02, 1 December 2016 | Half dome pinhole 1.jpg (file) |  |
55 KB | Peter | Synthetic pinhole camera view from an equirectangular image | 1 |
| 10:50, 14 November 2015 | Ihmc-logo.png (file) | 14 KB | Peter | The Institute for Human & Machine Cognition (IHMC) | 1 | |
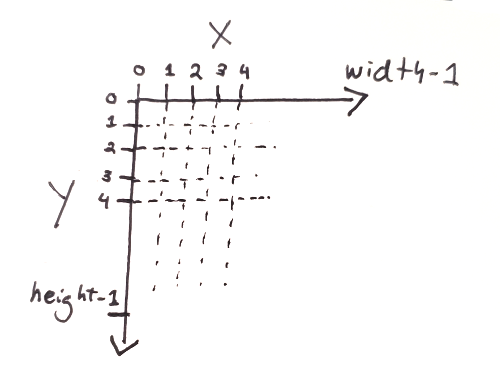
| 18:51, 29 December 2018 | Image coordinates.png (file) |  |
40 KB | Peter | 1 | |
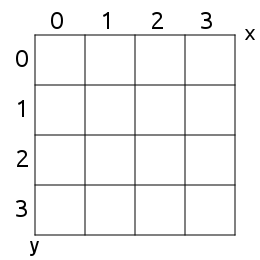
| 19:33, 24 January 2020 | Image pixel coordinates.png (file) |  |
4 KB | Peter | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}