File list
From BoofCV
Jump to navigationJump to searchThis special page shows all uploaded files.
{kind=link}
{kind=link}
| Date | Name | Thumbnail | Size | User | Description | Versions |
|---|---|---|---|---|---|---|
| 06:20, 25 October 2011 | Performance-descriptor-Bricks.jpg (file) |  |
5 KB | Peter | 1 | |
| 06:19, 25 October 2011 | Performance-descriptor-Boat.jpg (file) |  |
4 KB | Peter | 1 | |
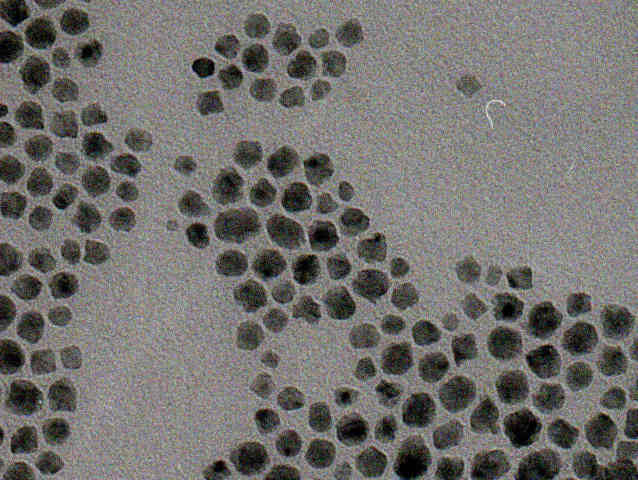
| 13:37, 18 October 2011 | Particles01.jpg (file) |  |
41 KB | Peter | Nano Particles from TEM image. | 1 |
| 20:19, 7 December 2016 | Original lena512.jpg (file) |  |
22 KB | Peter | Original unprocessed Lena photo. Classic photo used as a test image for image processing. | 1 |
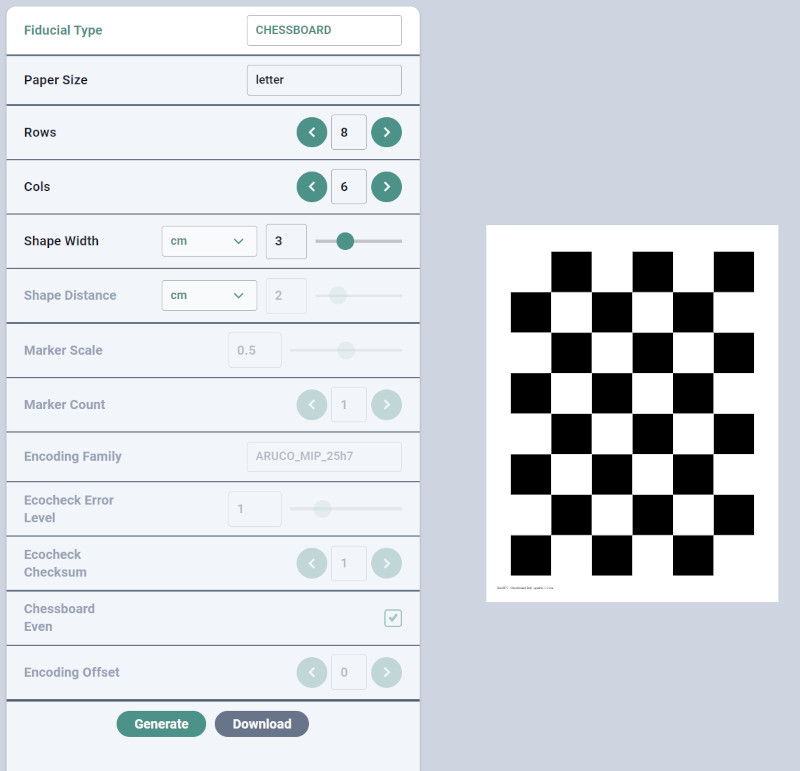
| 09:08, 10 November 2022 | Online calibration target generator.jpg (file) |  |
66 KB | Peter | 2 | |
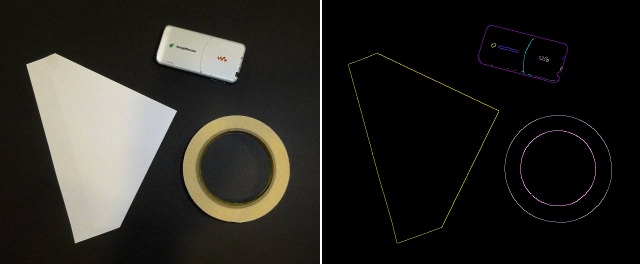
| 15:24, 6 July 2012 | Object contours.jpg (file) |  |
30 KB | Peter | Original image and the found contour around the objects using a canny edge detector. | 1 |
| 17:23, 7 January 2022 | Ninox360 icon logo moto.png (file) | 57 KB | Peter | 1 | ||
| 13:30, 22 December 2020 | Multi view uncalibrated sparse snowtree.mp4 (file) | 660 KB | Peter | 1 | ||
| 13:18, 22 December 2020 | Multi view uncalibrated dense snowtree.mp4 (file) | 578 KB | Peter | 1 | ||
| 12:44, 22 December 2020 | Multi baseline stereo snowtree.mp4 (file) | 522 KB | Peter | 1 | ||
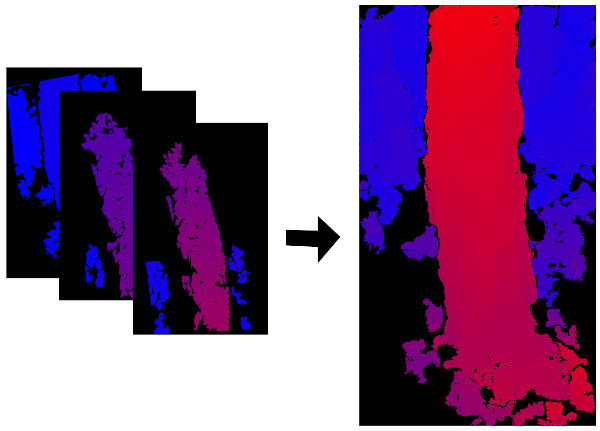
| 11:58, 22 December 2020 | Multi baseline disparity.jpg (file) |  |
58 KB | Peter | Visualization of a multi baseline stereo disparity approach where stereo disparity images are computed independently from a single common "central" image. | 1 |
| 15:00, 31 October 2011 | Main-page-help-icon.png (file) | 17 KB | Peter | Create by Peter Abeles | 1 | |
| 15:03, 31 October 2011 | Main-page-graph-icon.png (file) | 16 KB | Peter | Made by Peter Abeles | 1 | |
| 14:16, 31 October 2011 | Main-page-binary-icon.png (file) | 14 KB | Peter | http://www.iconarchive.com/show/glaze-icons-by-mart/binary-icon.html Artist: Mart License: GNU Lesser General Public License Commercial usage: Allowed | 1 | |
| 20:06, 5 January 2012 | Loose-lips.jpg (file) |  |
24 KB | Peter | BoofCV propaganda | 1 |
| 11:02, 14 November 2015 | Logo intellij idea.jpg (file) | 40 KB | Peter | 1 | ||
| 18:35, 5 December 2012 | Logo grace 125.png (file) |  |
30 KB | Peter | 2 | |
| 13:19, 18 October 2011 | Lenna gray.jpg (file) |  |
20 KB | Peter | Lenna standard test image. Note that this image has been compressed and is no longer useful for testing purposes. | 1 |
| 19:52, 14 March 2019 | Kodim17 noisy.jpg (file) |  |
66 KB | Peter | 1 | |
| 07:32, 15 March 2019 | Kodim17 gradient.jpg (file) |  |
46 KB | Peter | 1 | |
| 07:22, 15 March 2019 | Kodim17 face orig.jpg (file) |  |
44 KB | Peter | 1 | |
| 07:24, 15 March 2019 | Kodim17 face median.jpg (file) |  |
21 KB | Peter | 1 | |
| 07:23, 15 March 2019 | Kodim17 face mean.jpg (file) |  |
18 KB | Peter | 1 | |
| 07:23, 15 March 2019 | Kodim17 face gaussian.jpg (file) |  |
21 KB | Peter | 1 | |
| 19:52, 14 March 2019 | Kodim17 denoised.jpg (file) |  |
34 KB | Peter | 1 | |
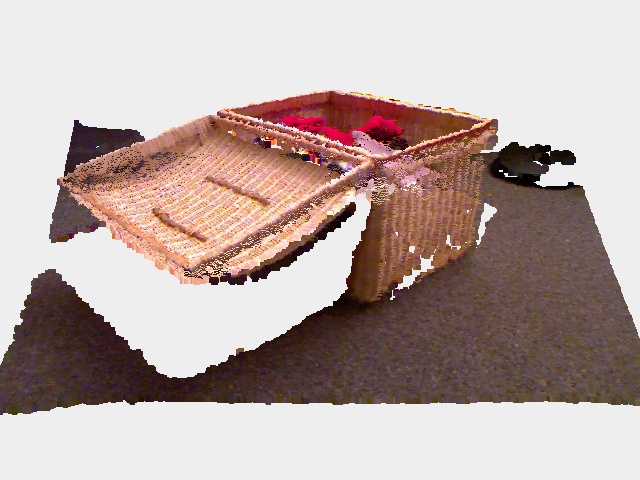
| 23:49, 19 June 2013 | Kinect point cloud basket.jpg (file) |  |
96 KB | Peter | Point cloud of an RGB and depth image from a kinect sensor. Synthetic view. | 1 |
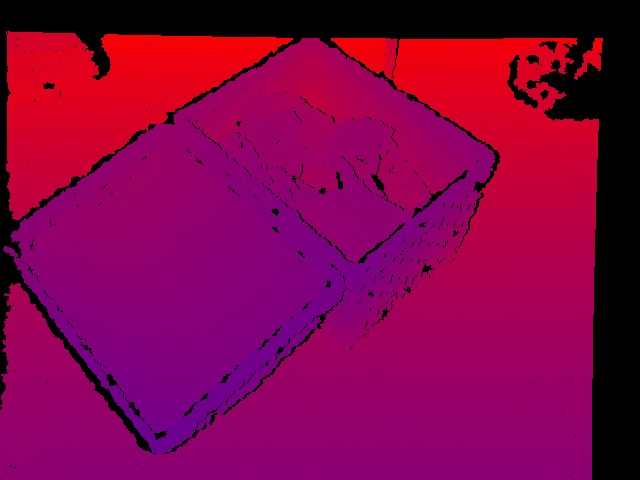
| 23:47, 19 June 2013 | Kinect depth basket.jpg (file) |  |
57 KB | Peter | Depth image from a kinect sensor of a basket. | 1 |
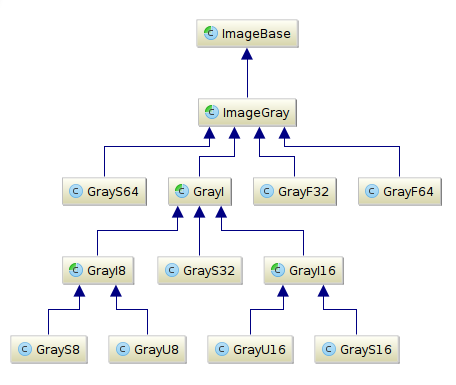
| 22:17, 28 March 2016 | Image type single class diagram.png (file) |  |
16 KB | Peter | 2 | |
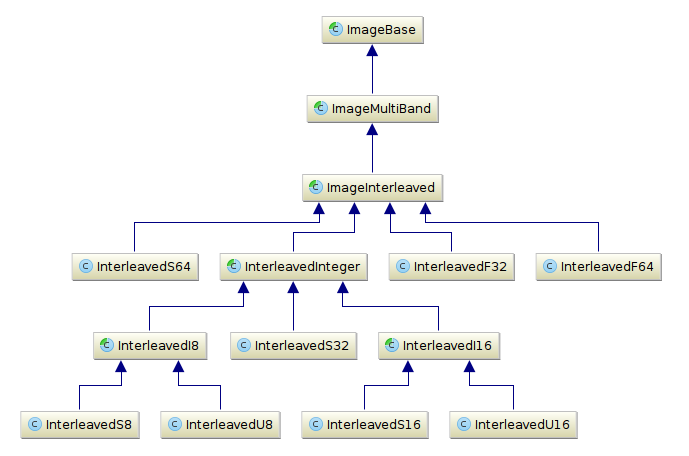
| 08:10, 29 March 2016 | Image type interleaved diagram.png (file) |  |
20 KB | Peter | 1 | |
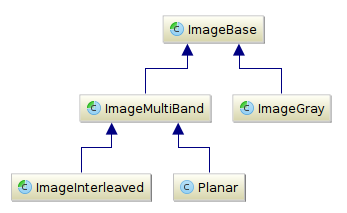
| 08:10, 29 March 2016 | Image type class diagram.png (file) |  |
9 KB | Peter | 3 | |
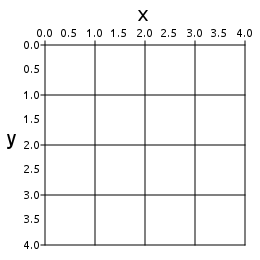
| 19:34, 24 January 2020 | Image spatial coordinates.png (file) |  |
5 KB | Peter | 1 | |
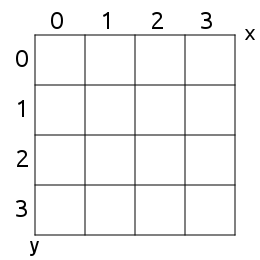
| 19:33, 24 January 2020 | Image pixel coordinates.png (file) |  |
4 KB | Peter | 1 | |
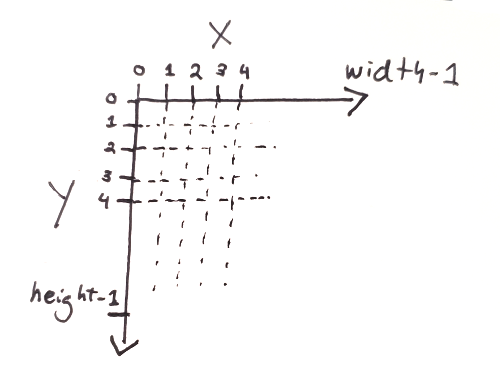
| 18:51, 29 December 2018 | Image coordinates.png (file) |  |
40 KB | Peter | 1 | |
| 10:50, 14 November 2015 | Ihmc-logo.png (file) | 14 KB | Peter | The Institute for Human & Machine Cognition (IHMC) | 1 | |
| 15:02, 1 December 2016 | Half dome pinhole 1.jpg (file) |  |
55 KB | Peter | Synthetic pinhole camera view from an equirectangular image | 1 |
| 14:58, 1 December 2016 | Half dome pinhole 0.jpg (file) |  |
51 KB | Peter | Synthetic pinhole camera view from an equirectangular image | 1 |
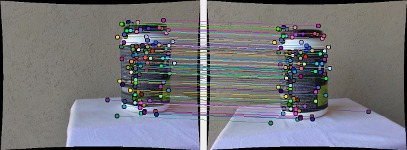
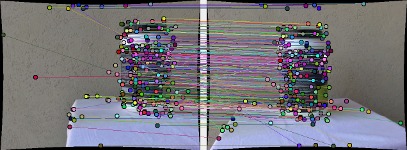
| 10:23, 18 April 2012 | Fundamental matches inliers.jpg (file) |  |
24 KB | Peter | Set of matched features after fundamental matrix has been computed using a robust algorithm. | 1 |
| 10:24, 18 April 2012 | Fundamental matches all.jpg (file) |  |
29 KB | Peter | Original set of feature matches before applying the epipolar constraint (Fundamental matrix). | 1 |
| 15:12, 1 December 2016 | Front table.jpg (file) |  |
153 KB | Peter | Front fisheye image from RICOH THETA S | 1 |
| 15:26, 1 December 2016 | Fisheye to pinhole right.jpg (file) |  |
65 KB | Peter | Synthetic pinhole view generated from a fisheye camera | 1 |
| 15:26, 1 December 2016 | Fisheye to pinhole front.jpg (file) |  |
66 KB | Peter | Synthetic pinhole view generated from a fisheye camera | 1 |
| 13:04, 19 September 2015 | Fingerprint.jpg (file) |  |
36 KB | Peter | Standard finger print image | 1 |
| 18:42, 9 September 2014 | Fiducial squre binary.png (file) |  |
1 KB | Peter | 2 | |
| 18:46, 9 September 2014 | Fiducial square image.png (file) |  |
2 KB | Peter | 3 | |
| 19:27, 3 September 2014 | Fiducial square binary detected.jpg (file) |  |
135 KB | Peter | 1 | |
| 17:42, 25 December 2013 | Example video stabilization.jpg (file) |  |
58 KB | Peter | Input image on the left and stabilized image on the right. Hard to tell from a single image, but it has been stabilized. | 1 |
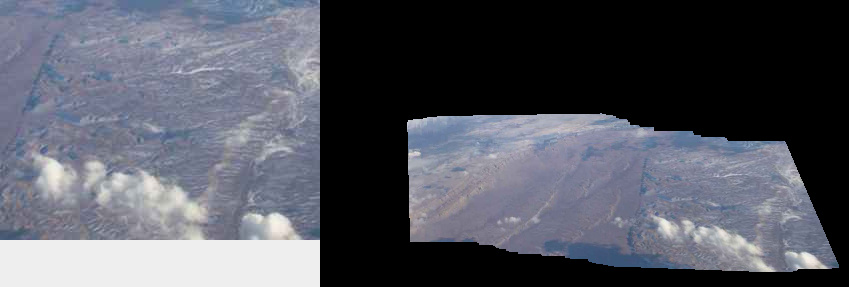
| 13:58, 14 April 2013 | Example video mosaic.jpg (file) |  |
44 KB | Peter | 2 | |
| 12:27, 18 April 2012 | Example unrectified.jpg (file) |  |
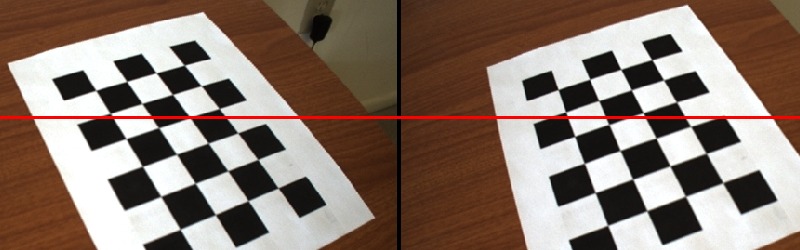
52 KB | Peter | Example of two stereo images before rectification. Note how the y-coordinate of feature do not line up. | 1 |
| 15:59, 18 April 2012 | Example undistorted fullview.jpg (file) |  |
21 KB | Peter | Lens distortion has been removed from the image and adjusted so that the entire original image can be seen. The black regions are an artifact of removing lens distortion. | 1 |
| 15:57, 18 April 2012 | Example undistorted allinside.jpg (file) |  |
19 KB | Peter | Lens distortion has been removed from the image and it has been adjusted to maximize the view region without including pixels outside the original view. | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}