Example Tracker Mean Shift
From BoofCV
Jump to navigationJump to search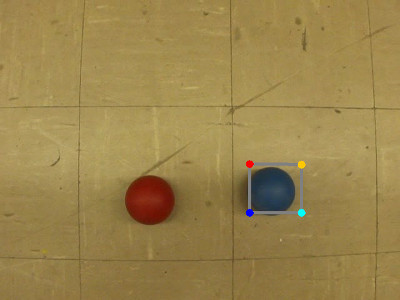
Mean-shift was used to track the ball across this video sequence.

BoofCV provides two mean-shift trackers, histogram and pixel likelihood, this example is for the second. It is demonstrated how to create a custom pixel likelihood fuction to track a color ball. Mean-shift performs a local search that attempts to maximize the similarity of the color in its kernel to the color in its model. It is a fairly robust and fast tracker. If you are lucky, it will sometimes even reaquire a track after it has been lost.
Example Code:
Concepts:
- Object tracking
- Color histogram
- Mean-shift
Example Code
/**
* Example of how to use the low level implementation of mean-shift to track a specific color provided by the user.
* The weights of each pixel is computed by RgbLikelihood, see below, and track regions are rectangular. This
* tracker works very well since the ball is almost uniformly blue. If the light varried then a HSV color
* model might be better.
*
* @author Peter Abeles
*/
public class ExampleTrackerMeanShiftLikelihood {
/**
* Very simple implementation of PixelLikelihood. Uses linear distance to compute how close
* a color is to the target color.
*/
public static class RgbLikelihood implements PixelLikelihood<Planar<GrayU8>> {
int targetRed, targetGreen, targetBlue;
float radius = 35;
Planar<GrayU8> image;
public RgbLikelihood( int targetRed, int targetGreen, int targetBlue ) {
this.targetRed = targetRed;
this.targetGreen = targetGreen;
this.targetBlue = targetBlue;
}
@Override public void setImage( Planar<GrayU8> image ) { this.image = image; }
@Override public boolean isInBounds( int x, int y ) { return image.isInBounds(x, y); }
/**
* This function is used to learn the target's model from the select image region. Since the
* model is provided in the constructor it isn't needed or used.
*/
@Override
public void createModel( RectangleLength2D_I32 target ) { throw new RuntimeException("Not supported"); }
@Override
public float compute( int x, int y ) {
int pixelR = image.getBand(0).get(x, y);
int pixelG = image.getBand(1).get(x, y);
int pixelB = image.getBand(2).get(x, y);
// distance along each color band
float red = Math.max(0, 1.0f - Math.abs(targetRed - pixelR)/radius);
float green = Math.max(0, 1.0f - Math.abs(targetGreen - pixelG)/radius);
float blue = Math.max(0, 1.0f - Math.abs(targetBlue - pixelB)/radius);
// multiply them all together
return red*green*blue;
}
}
public static void main( String[] args ) {
MediaManager media = DefaultMediaManager.INSTANCE;
String fileName = UtilIO.pathExample("tracking/balls_blue_red.mjpeg");
RectangleLength2D_I32 location = new RectangleLength2D_I32(394, 247, 475 - 394, 325 - 247);
ImageType<Planar<GrayU8>> imageType = ImageType.pl(3, GrayU8.class);
SimpleImageSequence<Planar<GrayU8>> video = media.openVideo(fileName, imageType);
// Return a higher likelihood for pixels close to this RGB color
var likelihood = new RgbLikelihood(64, 71, 69);
TrackerMeanShiftLikelihood<Planar<GrayU8>> tracker =
new TrackerMeanShiftLikelihood<>(likelihood, 50, 0.1f);
// specify the target's initial location and initialize with the first frame
Planar<GrayU8> frame = video.next();
// Note that the tracker will not automatically invoke RgbLikelihood.createModel() in its initialize function
tracker.initialize(frame, location);
// For displaying the results
var gui = new TrackerObjectQuadPanel(null);
gui.setPreferredSize(new Dimension(frame.getWidth(), frame.getHeight()));
gui.setImageUI(video.getGuiImage());
gui.setTarget(location, true);
ShowImages.showWindow(gui, "Tracking Results", true);
// Track the object across each video frame and display the results
while (video.hasNext()) {
frame = video.next();
boolean visible = tracker.process(frame);
gui.setImageUI(video.getGuiImage());
gui.setTarget(tracker.getLocation(), visible);
gui.repaint();
BoofMiscOps.pause(20);
}
}
}