Package boofcv.alg.fiducial.calib
Class DetectFiducialSquareGrid<T extends ImageGray<T>>
java.lang.Object
boofcv.alg.fiducial.calib.DetectFiducialSquareGrid<T>
A fiducial composed of
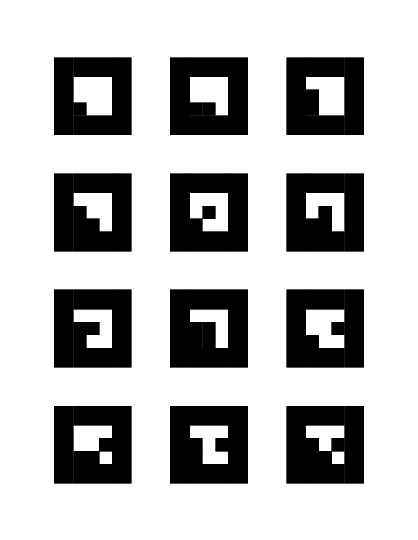
Example of a grid of square binary fiducials. Any square fiducial can be used, including those with images inside.
BaseDetectFiducialSquare intended for use in calibration.
It allows parts of the fiducial to be visible and uniquely determined across multiple cameras. The algorithm
simply looks for the expected fiducials in an image and saves the corners that they appear at. Does not check to
see if the ordering is correct. If the same fiducial appears multiple times that fiducial is ignored. Only one
grid fiducial is expected to be visible at any time.
The user must provide a set of fiducial ID numbers. Each unique numbers corresponds to an expected fiducial. The
first number in the list refers to the fiducial in the top left corner (minus X and positive Y) in the fiducial's
frame. The other elements are added in a row-major order.
-
Nested Class Summary
Nested ClassesModifier and TypeClassDescriptionstatic classA detected inner fiducial. -
Constructor Summary
ConstructorsConstructorDescriptionDetectFiducialSquareGrid(int numRows, int numCols, long[] numbers, BaseDetectFiducialSquare<T> detector) Configures the fiducial detector. -
Method Summary
Modifier and TypeMethodDescriptionbooleanSearches for the fiducial inside the image.
-
Constructor Details
-
DetectFiducialSquareGrid
public DetectFiducialSquareGrid(int numRows, int numCols, long[] numbers, BaseDetectFiducialSquare<T> detector) Configures the fiducial detector.- Parameters:
numRows- Number of rows in the gridnumCols- Number of columns in the grdnumbers- The fiducial ID numbers its expected to see. Order matters.detector- Fiducial detector
-
-
Method Details
-
detect
Searches for the fiducial inside the image. If at least a partial match is found true is returned.- Parameters:
input- Input image- Returns:
- true if at least one of the component fiducials is detected. False otherwise
-
getDetections
-
getDetector
-