Example Fundamental Matrix
From BoofCV
Jump to navigationJump to search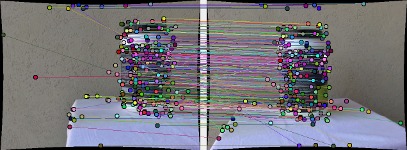
Original set of matched features.
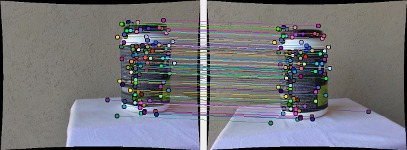
Inlier set of matched features from robust Fundamental matrix computation.


The Fundamental matrix is a 3 by 3 matrix which describes the geometric (epipolar) relationship between two images. In the example below, features are automatically found and the fundamental matrix computed using two different techniques. The robust technique uses RANSAC to remove incorrect image pairs (see image above) followed by non-linear optimization. The simple technique assumes that all the image pairs are correct (not true in this scenario) and apply a fast to compute linear algorithm.
Example File: ExampleComputeFundamentalMatrix.java
Concepts:
- Epipolar constraint
- Fundamental matrix
- Stereo Vision
Related Examples:
Example Code
/**
* A Fundamental matrix describes the epipolar relationship between two images. If two points, one from
* each image, match, then the inner product around the Fundamental matrix will be zero. If a fundamental
* matrix is known, then information about the scene and its structure can be extracted.
*
* Below are two examples of how a Fundamental matrix can be computed using different.
* The robust technique attempts to find the best fit Fundamental matrix to the data while removing noisy
* matches, The simple version just assumes that all the matches are correct. Similar techniques can be used
* to fit various other types of motion or structural models to observations.
*
* The input image and associated features are displayed in a window. In another window, inlier features
* from robust model fitting are shown.
*
* @author Peter Abeles
*/
public class ExampleComputeFundamentalMatrix {
/**
* Given a set of noisy observations, compute the Fundamental matrix while removing the noise.
*
* @param matches List of associated features between the two images
* @param inliers List of feature pairs that were determined to not be noise.
* @return The found fundamental matrix.
*/
public static DMatrixRMaj robustFundamental( List<AssociatedPair> matches,
List<AssociatedPair> inliers, double inlierThreshold ) {
var configRansac = new ConfigRansac();
configRansac.inlierThreshold = inlierThreshold;
configRansac.iterations = 1000;
ConfigFundamental configFundamental = new ConfigFundamental();
configFundamental.which = EnumFundamental.LINEAR_7;
configFundamental.numResolve = 2;
configFundamental.errorModel = ConfigFundamental.ErrorModel.GEOMETRIC;
// geometric error is the most accurate error metric, but also the slowest to compute. See how the
// results change if you switch to sampson and how much faster it is. You also should adjust
// the inlier threshold.
ModelMatcher<DMatrixRMaj, AssociatedPair> ransac =
FactoryMultiViewRobust.fundamentalRansac(configFundamental, configRansac);
// Estimate the fundamental matrix while removing outliers
if (!ransac.process(matches))
throw new IllegalArgumentException("Failed");
// save the set of features that were used to compute the fundamental matrix
inliers.addAll(ransac.getMatchSet());
// Improve the estimate of the fundamental matrix using non-linear optimization
var F = new DMatrixRMaj(3, 3);
ModelFitter<DMatrixRMaj, AssociatedPair> refine =
FactoryMultiView.fundamentalRefine(1e-8, 400, EpipolarError.SAMPSON);
if (!refine.fitModel(inliers, ransac.getModelParameters(), F))
throw new IllegalArgumentException("Failed");
// Return the solution
return F;
}
/**
* If the set of associated features are known to be correct, then the fundamental matrix can
* be computed directly with a lot less code. The down side is that this technique is very
* sensitive to noise.
*/
public static DMatrixRMaj simpleFundamental( List<AssociatedPair> matches ) {
// Use the 8-point algorithm since it will work with an arbitrary number of points
Estimate1ofEpipolar estimateF = FactoryMultiView.fundamental_1(EnumFundamental.LINEAR_8, 0);
var F = new DMatrixRMaj(3, 3);
if (!estimateF.process(matches, F))
throw new IllegalArgumentException("Failed");
// while not done here, this initial linear estimate can be refined using non-linear optimization
// as was done above.
return F;
}
/**
* Use the associate point feature example to create a list of {@link AssociatedPair} for use in computing the
* fundamental matrix.
*/
public static List<AssociatedPair> computeMatches( BufferedImage left, BufferedImage right ) {
DetectDescribePoint<GrayF32, TupleDesc_F64> detDesc = FactoryDetectDescribe.surfStable(
new ConfigFastHessian(0, 2, 400, 1, 9, 4, 4), null, null, GrayF32.class);
// DetectDescribePoint detDesc = FactoryDetectDescribe.sift(null,new ConfigSiftDetector(2,0,200,5),null,null);
ScoreAssociation<TupleDesc_F64> scorer = FactoryAssociation.scoreEuclidean(TupleDesc_F64.class, true);
AssociateDescription<TupleDesc_F64> associate = FactoryAssociation.greedy(new ConfigAssociateGreedy(true, 0.1), scorer);
var findMatches = new ExampleAssociatePoints<>(detDesc, associate, GrayF32.class);
findMatches.associate(left, right);
List<AssociatedPair> matches = new ArrayList<>();
FastAccess<AssociatedIndex> matchIndexes = associate.getMatches();
for (int i = 0; i < matchIndexes.size; i++) {
AssociatedIndex a = matchIndexes.get(i);
var p = new AssociatedPair(findMatches.pointsA.get(a.src), findMatches.pointsB.get(a.dst));
matches.add(p);
}
return matches;
}
public static void main( String[] args ) {
String dir = UtilIO.pathExample("structure/");
BufferedImage imageA = UtilImageIO.loadImage(dir, "undist_cyto_01.jpg");
BufferedImage imageB = UtilImageIO.loadImage(dir, "undist_cyto_02.jpg");
List<AssociatedPair> matches = computeMatches(imageA, imageB);
// Where the fundamental matrix is stored
DMatrixRMaj F;
// List of matches that matched the model
List<AssociatedPair> inliers = new ArrayList<>();
// estimate and print the results using a robust and simple estimator
// The results should be difference since there are many false associations in the simple model
// Also note that the fundamental matrix is only defined up to a scale factor.
F = robustFundamental(matches, inliers, 0.5);
System.out.println("Robust");
CommonOps_DDRM.divide(F, NormOps_DDRM.normF(F)); // scale to make comparision easier
F.print();
F = simpleFundamental(matches);
System.out.println("Simple");
CommonOps_DDRM.divide(F, NormOps_DDRM.normF(F));
F.print();
// display the inlier matches found using the robust estimator
var panel = new AssociationPanel(20);
panel.setAssociation(inliers);
panel.setImages(imageA, imageB);
ShowImages.showWindow(panel, "Inlier Pairs");
}
}