Tutorial Kinect
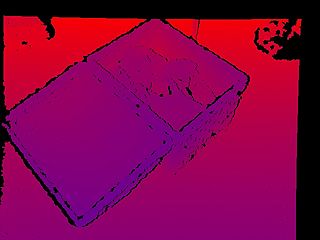
Depth image from Kinect sensor
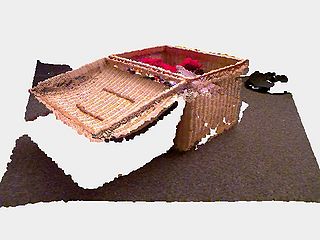
3D point cloud created from RGB and depth images


The Kinect a popular RGB-D sensor which provides both video and depth information. BoofCV provides support for the [1] driver directly through several helper function. The project already provides a Java interface. The Kinect is much easier to work with than stereo cameras and provides similar information. The major downside to working with a Kinect sensor is that they can't be use outdoors and have a more limited range.
To access helper function for Kinect in BoofCV go to the boofcv/integration/openkinect directory. Several useful examples and utilities are provided in the openkinect/examples directory, while the main source code is in openkinect/src directory. To use these functions, be sure to include the BoofCV_OpenKinect.jar in your project. This can be downloaded precompile or you can compile it yourself using ant.
Two classes are provided in the Kinect jar, StreamOpenKinectRgbDepth and UtilOpenKinect. StreamOpenKinectRgbDepth is a high level interface for streaming data from a kinect using OpenKinect. UtilOpenKinect contains functions for manipulating, reading, and saving Kinect data. The depth image is stored as an unsigned 16-bit gray scale image (GrayU16) and the RGB in any standard image format.
Relevant Applets:
Related Examples:
Usage Example
Many more examples are provided in the openkinect/examples directory. Here is one showing typical usage.
/**
* Example demonstrating how to process and display data from the Kinect.
*
* @author Peter Abeles
*/
public class OpenKinectStreamingTest {
{
// be sure to set OpenKinectExampleParam.PATH_TO_SHARED_LIBRARY to the location of your shared library!
NativeLibrary.addSearchPath("freenect", OpenKinectExampleParam.PATH_TO_SHARED_LIBRARY);
}
Planar<GrayU8> rgb = new Planar<GrayU8>(GrayU8.class,1,1,3);
GrayU16 depth = new GrayU16(1,1);
BufferedImage outRgb;
ImagePanel guiRgb;
BufferedImage outDepth;
ImagePanel guiDepth;
public void process() {
Context kinect = Freenect.createContext();
if( kinect.numDevices() < 0 )
throw new RuntimeException("No kinect found!");
Device device = kinect.openDevice(0);
device.setDepthFormat(DepthFormat.REGISTERED);
device.setVideoFormat(VideoFormat.RGB);
device.startDepth(new DepthHandler() {
@Override
public void onFrameReceived(FrameMode mode, ByteBuffer frame, int timestamp) {
processDepth(mode,frame,timestamp);
}
});
device.startVideo(new VideoHandler() {
@Override
public void onFrameReceived(FrameMode mode, ByteBuffer frame, int timestamp) {
processRgb(mode,frame,timestamp);
}
});
long starTime = System.currentTimeMillis();
while( starTime+100000 > System.currentTimeMillis() ) {}
System.out.println("100 Seconds elapsed");
device.stopDepth();
device.stopVideo();
device.close();
}
protected void processDepth( FrameMode mode, ByteBuffer frame, int timestamp ) {
System.out.println("Got depth! "+timestamp);
if( outDepth == null ) {
depth.reshape(mode.getWidth(),mode.getHeight());
outDepth = new BufferedImage(depth.width,depth.height,BufferedImage.TYPE_INT_RGB);
guiDepth = ShowImages.showWindow(outDepth,"Depth Image");
}
UtilOpenKinect.bufferDepthToU16(frame, depth);
// VisualizeImageData.grayUnsigned(depth,outDepth,UtilOpenKinect.FREENECT_DEPTH_MM_MAX_VALUE);
VisualizeImageData.disparity(depth, outDepth, 0, UtilOpenKinect.FREENECT_DEPTH_MM_MAX_VALUE,0);
guiDepth.repaint();
}
protected void processRgb( FrameMode mode, ByteBuffer frame, int timestamp ) {
if( mode.getVideoFormat() != VideoFormat.RGB ) {
System.out.println("Bad rgb format!");
}
System.out.println("Got rgb! "+timestamp);
if( outRgb == null ) {
rgb.reshape(mode.getWidth(),mode.getHeight());
outRgb = new BufferedImage(rgb.width,rgb.height,BufferedImage.TYPE_INT_RGB);
guiRgb = ShowImages.showWindow(outRgb,"RGB Image");
}
UtilOpenKinect.bufferRgbToMsU8(frame, rgb);
ConvertBufferedImage.convertTo_U8(rgb,outRgb,true);
guiRgb.repaint();
}
public static void main( String args[] ) {
OpenKinectStreamingTest app = new OpenKinectStreamingTest();
app.process();
}
}