Example Point Cloud Depth Image
From BoofCV
Jump to navigationJump to search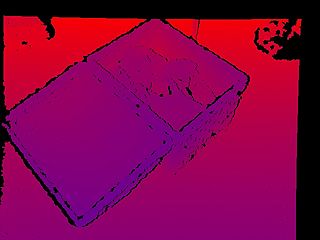
Depth image from Kinect sensor
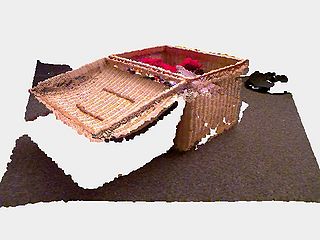
3D point cloud created from RGB and depth images


This example demonstrates how to create a 3D point cloud from a RGB-D sensor, such as the Kinect, and visualize it. RGB-D sensors have both visual and depth information. In this example the depth information is stored in a 16-bit image and the visual image in a standard color image. Calibration matching RGB an depth pixels to each other has already been done by the sensor.
Example Code:
Concepts:
- RGB-D
- Point clouds
Related Examples:
Example Code
/**
* Example of how to create a point cloud from a RGB-D (Kinect) sensor. Data is loaded from two files, one for the
* visual image and one for the depth image.
*
* @author Peter Abeles
*/
public class ExampleDepthPointCloud {
public static void main( String[] args ) {
String nameRgb = UtilIO.pathExample("kinect/basket/basket_rgb.png");
String nameDepth = UtilIO.pathExample("kinect/basket/basket_depth.png");
String nameCalib = UtilIO.pathExample("kinect/basket/visualdepth.yaml");
VisualDepthParameters param = CalibrationIO.load(nameCalib);
BufferedImage buffered = UtilImageIO.loadImageNotNull(nameRgb);
Planar<GrayU8> rgb = ConvertBufferedImage.convertFromPlanar(buffered, null, true, GrayU8.class);
GrayU16 depth = ConvertBufferedImage.convertFrom(UtilImageIO.loadImageNotNull(nameDepth), null, GrayU16.class);
var cloud = new DogArray<>(Point3D_F64::new);
var cloudColor = new DogArray<>(() -> new int[3]);
VisualDepthOps.depthTo3D(param.visualParam, rgb, depth, cloud, cloudColor);
PointCloudViewer viewer = VisualizeData.createPointCloudViewer();
viewer.setCameraHFov(PerspectiveOps.computeHFov(param.visualParam));
viewer.setTranslationStep(15);
for (int i = 0; i < cloud.size; i++) {
Point3D_F64 p = cloud.get(i);
int[] color = cloudColor.get(i);
int c = (color[0] << 16) | (color[1] << 8) | color[2];
viewer.addPoint(p.x, p.y, p.z, c);
}
viewer.getComponent().setPreferredSize(new Dimension(rgb.width, rgb.height));
// ---------- Display depth image
// use the actual max value in the image to maximize its appearance
int maxValue = ImageStatistics.max(depth);
BufferedImage depthOut = VisualizeImageData.disparity(depth, null, maxValue, 0);
ShowImages.showWindow(depthOut, "Depth Image", true);
// ---------- Display colorized point cloud
ShowImages.showWindow(viewer.getComponent(), "Point Cloud", true);
System.out.println("Total points = " + cloud.size);
}
}